When the rest of command travel distance is other than "0", ST1 (Forward rotation start) will not be accepted. Refer to section
6.4.5 (1).
RT (Second acceleration/deceleration selection) will not be accepted during operation. Selection of the servo motor speed and
acceleration/deceleration time constants will be enabled by on-edge of ST1 (Forward rotation start). However, when the rest of
command travel distance is other than "0", turning on ST1 (Forward rotation start) will not be enabled.
Counting will start when the rest of command travel distance becomes "0".
When MEND (Travel completion) is off, the station position outputs will be "0" (all off).
16.19 MANUAL OPERATION MODE
When the operation mode is changed during operation, inputting ST1 (Forward
rotation start) is disabled until the operation stops. Switch on ST1 (Forward
rotation start) after the operation stops.
For the machine adjustment, home position adjustment, and others, you can shift the position to any position
with the station JOG operation or JOG operation.
16.19.1 Station JOG operation
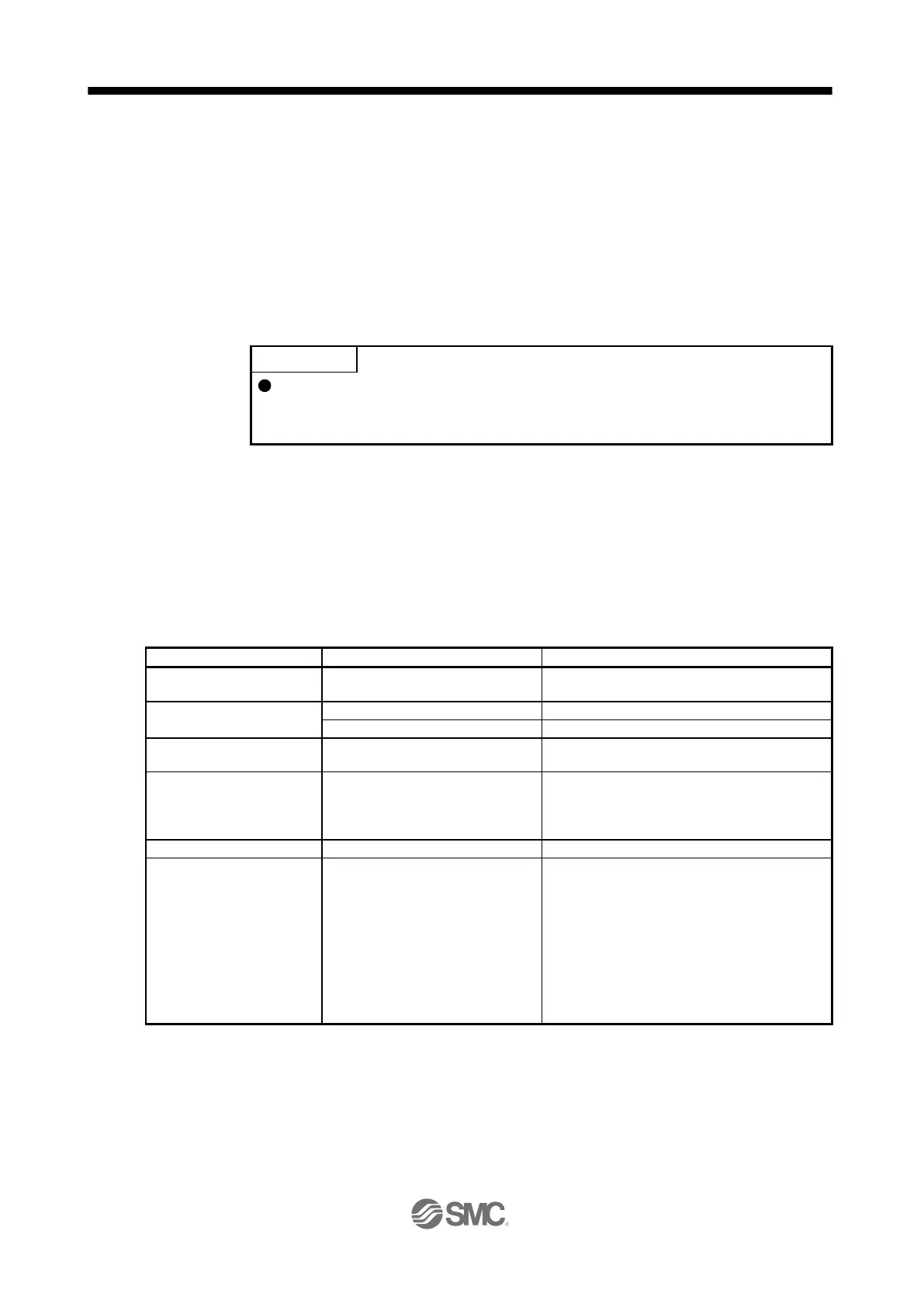
(1) Setting
According to the purpose of use, set devices and parameters as shown below. With this operation, DI0
(Next station No. selection 1) to DI7 (Next station No. selection 8) are disabled.
Control mode selection of [Pr. PA01]
Select "_ _ _ 8" (positioning mode (indexer
method)).
Manual operation mode
selection
MD0 (Operation mode selection 1)
MD1 (Operation mode selection 2)
Station JOG operation
selection
Select "_ _ 0 _" (Station JOG operation).
Rotation direction selection
SIG (External limit/Rotation direction
decision/Automatic speed selection)
The rotation direction to a station No. will be as
follows.
Off: Station No. decreasing direction
On: Station No. increasing direction
Acceleration time
constant/Deceleration time
constant
RT (Second acceleration/deceleration
selection)
1. When RT is turned off
Acceleration time constant: setting value of [Pr.
PC01 Acceleration time constant 1]
Deceleration time constant: setting value of [Pr.
PC02 Deceleration time constant 1]
2. When RT is turned on
Acceleration time constant: setting value of [Pr.
PC30 Acceleration time constant 2]
Deceleration time constant: setting value of [Pr.
PC31 Deceleration time constant 2]

 Loading...
Loading...