17.Positioning mode (pushing operation)
17.8 Pushing error detection
If the pushing operation cannot be continued or the pushing operation cannot be started during the point
table type pushing operation, a pushing error is detected, the dynamic brake is activated, and the motor
stops.
At this time, PERR (Pushing error) turns on. PERR turns off when RES (reset) or ST1 (start signal) turns
on. During alarm [7F. □], turning off PERR (Pushing error) by ST1 (start signal) is disabled.
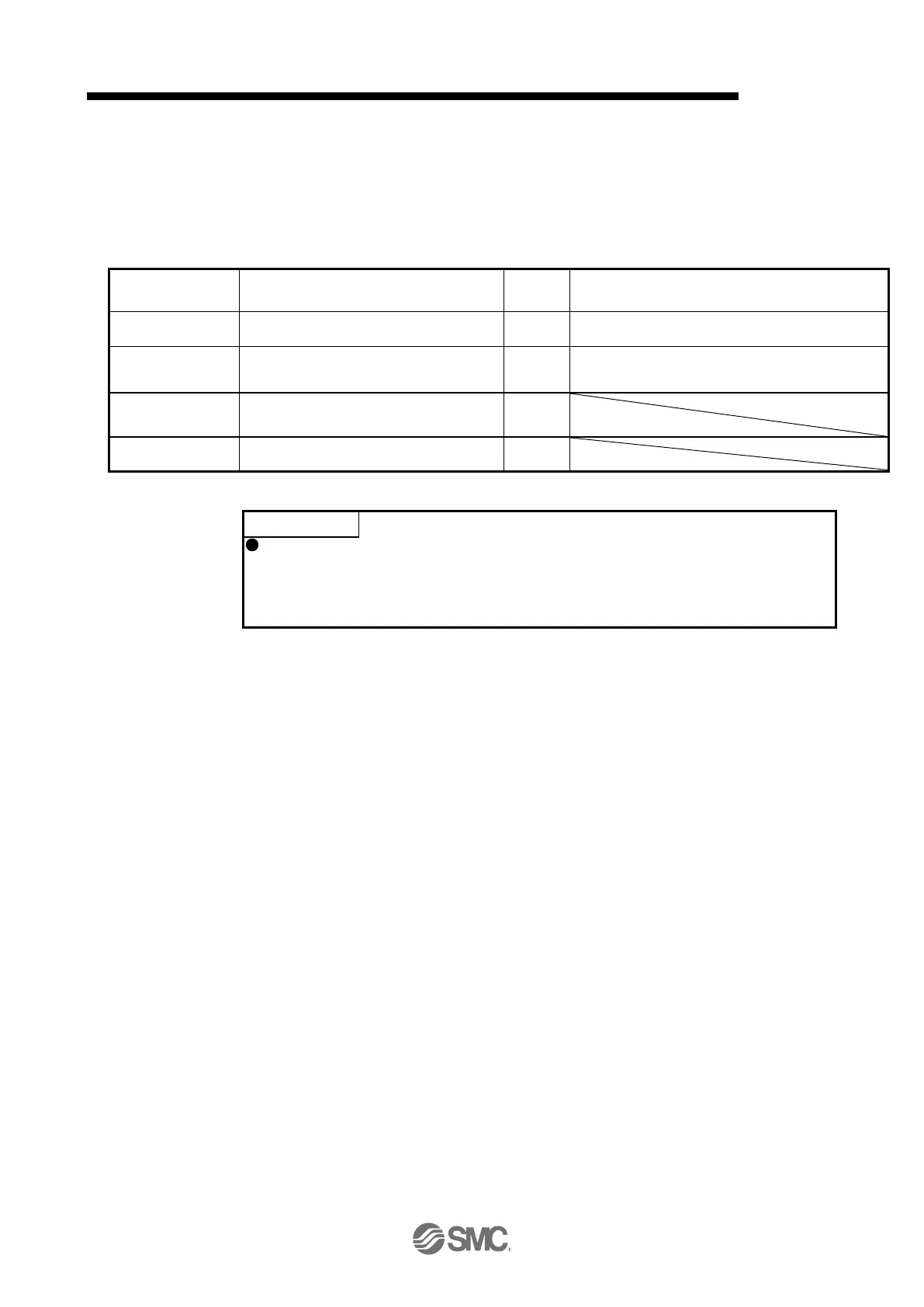
Pushing error is detected due to the following factors.
The current position has exceeded the Push
limit position during the pushing operation.
[Pr.PS01] Select the detection method with
“_ _ _ x”.
During the pushing operation, the current
position is pushed back from the starting
position.
[Pr.PS01] “_ _ x _” can be used to select the detection
method.
Abnormal relationship between Positioning
start position, Pushing start position, Push limit
position
The starting method of the pushing operation
is abnormal.
※For details of the alarm [7F. □], refer to Section 6.3 Troubleshooting in this specification.
In the case of an incremental system, the origin is lost when the servo is turned off
due to an alarm.
After resetting the alarm with RES (reset), perform home return again.
Or, select [Pr.PT02] “_ _ _ 1” (follow-up at servo-off)
Origin disappearance can be avoided.

 Loading...
Loading...