16.11.2 Program language
The maximum number of steps of a program is 640. Up to 256 programs can be created; however, the total
number of the steps of all programs must be 640 or less.
A set program is selectable by using DI0 (Program No. selection 1) to DI7 (Program No. selection 8).
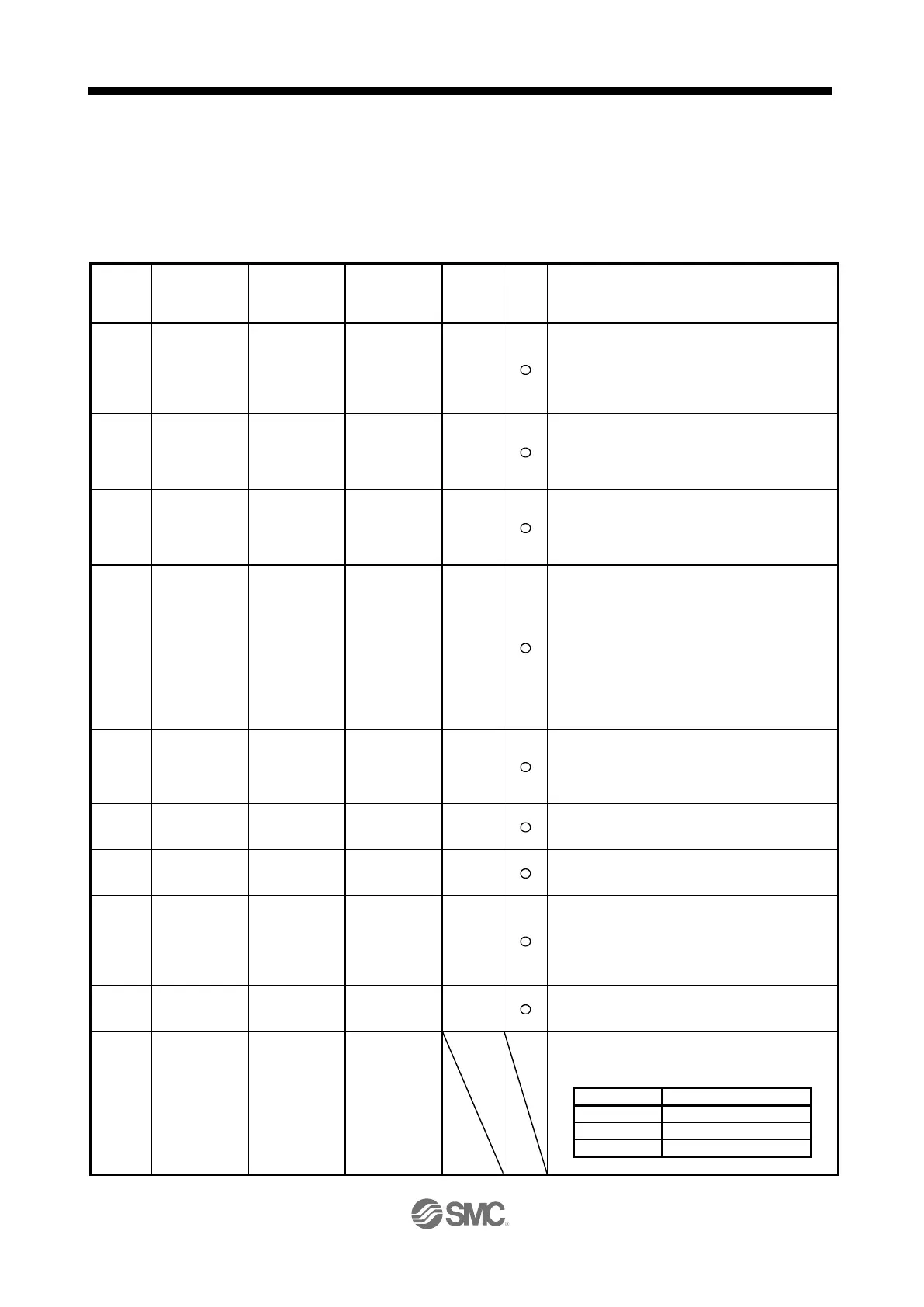
(1) Command list
Indirect
specif-
ication
(Note 7)
0 to
permissible
instantaneous
speed
Set the servo motor speed for positioning using this
command.
The setting value must be the permissible instantaneous
speed or less of the servo motor used.
If the setting value is unspecified, the servo motor rotates
at 50 r/min.
Acceleration time
constant
Set the acceleration time constant. The setting value is
the time from when the used servo motor stops until when
its speed reaches the rated speed.
The value cannot be changed during a command output.
If the setting value is unspecified, 1000 ms is applied.
Deceleration time
constant
Set the deceleration time constant. The setting value is
the time from when the used servo motor rotates at the
rated speed until when the motor stops.
The value cannot be changed during a command output.
If the setting value is unspecified, 1000 ms is applied.
Acceleration/
deceleration time
constant
Set the acceleration/deceleration time constants.
The setting value is a time period that the servo motor
reaches the rated speed from a stop, and stops from the
rated speed.
When this command is used, the acceleration time
constant and the deceleration time constant become the
same.
To set the acceleration/deceleration time constants
individually, use the "STA" and "STB" commands.
The value cannot be changed during a command output.
If the setting value is unspecified, 1000 ms is applied.
S-pattern
acceleration/
deceleration time
constant
Set the S-pattern acceleration/deceleration time
constants.
Set this command to insert S-pattern
acceleration/deceleration time constants against the
acceleration/deceleration time constants of the program.
Absolute value
travel command
-999999
to 999999
(Note 6)
The servo motor rotates using the set value as the
absolute value.
Absolute value
continuous travel
command
-999999
to 999999
(Note 6)
The servo motor rotates continuously using the set
value as the absolute value. Make sure to describe this
command after the "MOV" command.
Incremental value
travel command
-999999
to 999999
(Note 6)
The servo motor rotates using the set value as the
incremental value.
When a negative value is set, the servo motor rotates in
the reverse rotation direction.
For the reverse rotation, the servo motor rotates in the
address decreasing direction.
Incremental value
continuous travel
command
-999999
to 999999
(Note 6)
The servo motor rotates continuously using the set value
as the incremental value. Make sure to describe this
command after the "MOVI" command.
The following steps stop after SOUT (SYNC synchronous
output) is output until PI1 (Program input 1) to PI3
(Program input 3) are switched on.

 Loading...
Loading...