16.18 AUTOMATIC OPERATION MODE
There are the following conditions between the number of gear teeth on machine
side ([Pr. PA06 Number of gear teeth on machine side]) and servo motor speed
(N).
When CMX ≤ 2000, N < 3076.7 r/min
When CMX > 2000, N < 3276.7 - CMX r/min
When the servo motor is operated at servo motor speed higher than the limit
value, [AL. E3 Absolute position counter warning] occurs.
When the same next station No. is specified as station No. of the current
position and a positioning operation is executed, the motor does not start
because the travel distance is decided as "0".
16.18.1 Automatic operation mode
(1) Logic of indexer
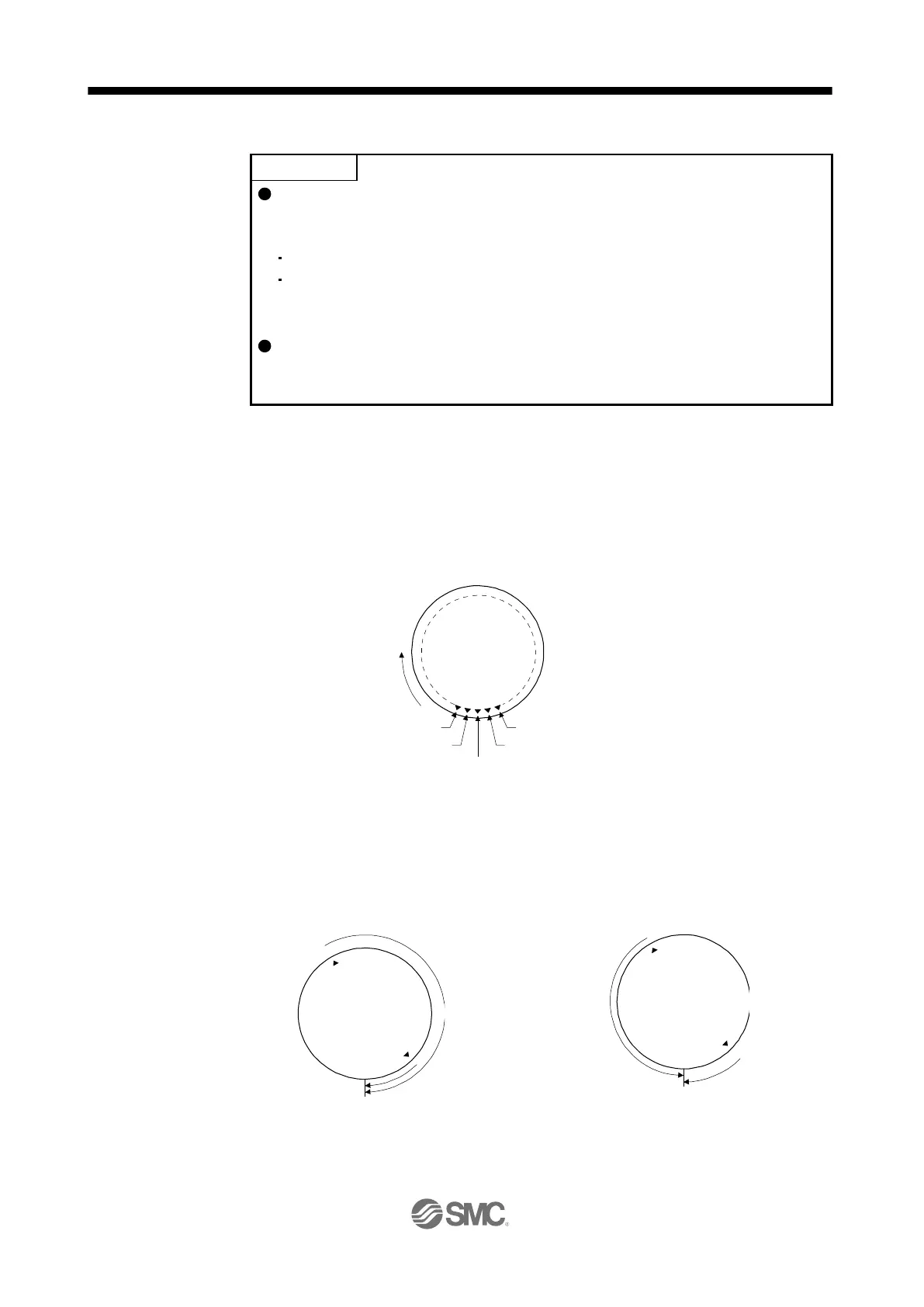
The positioning is executed like this. A station, which one of the divided circumference (360 degrees)
into 255 at most on the machine side, is selected by using 8-bit devices of the DI0 (Next station No.
selection 1) to DI7 (Next station No. selection 8). The following diagram is an example for when [Pr.
PA14] is set to "0".
The station No. 0 is set as a home position. The number of divisions is set with [Pr. PT28].
(2) Rotation direction
There are two operation methods: Rotation direction specifying indexer, which always rotates in a fixed
direction and execute positioning to a station; Shortest rotating indexer, which automatically changes a
rotation direction to the shortest distance and execute positioning to a station
Rotation direction specifying indexer
Shortest rotating indexer
Station No. 0
Station No. 254
Station No. 253Station No. 2
Station No. 1
CW direction

 Loading...
Loading...