17.Positioning mode (pushing operation)
17.7.6 About pushing operation in the direction of decreasing position address
(1) Point table setting example
a) For positioning operation (absolute value command method) and pushing operation (absolute value
command method)
Position data /
Pushing limit
position
[10^stm μm]
Servo motor rotation
speed / speed limit
value
[r/min]
Acceleration
time
constant
[ms]
Deceleration
time
constant
[ms]
Note1 : In the case of the position address decreasing direction, set the position data of the point table
data / Push limit position with a negative value.
Note2: The set value of the point table becomes invalid. Refer to section 6.1.3 of this specification for
details.
b) For positioning operation (absolute value command method) and pushing operation (incremental
value command method)
Position data /
Pushing limit
position
[10^stm μm]
Servo motor rotation
speed / speed limit
value
[r/min]
Acceleration
time
constant
[ms]
Deceleration
time
constant
[ms]
Note1 : In the case of the position address decreasing direction, set the position data of the point table
data / Push limit position with a negative value.
Note2: The set value of the point table becomes invalid. Refer to section 6.1.3 of this specification for
details.
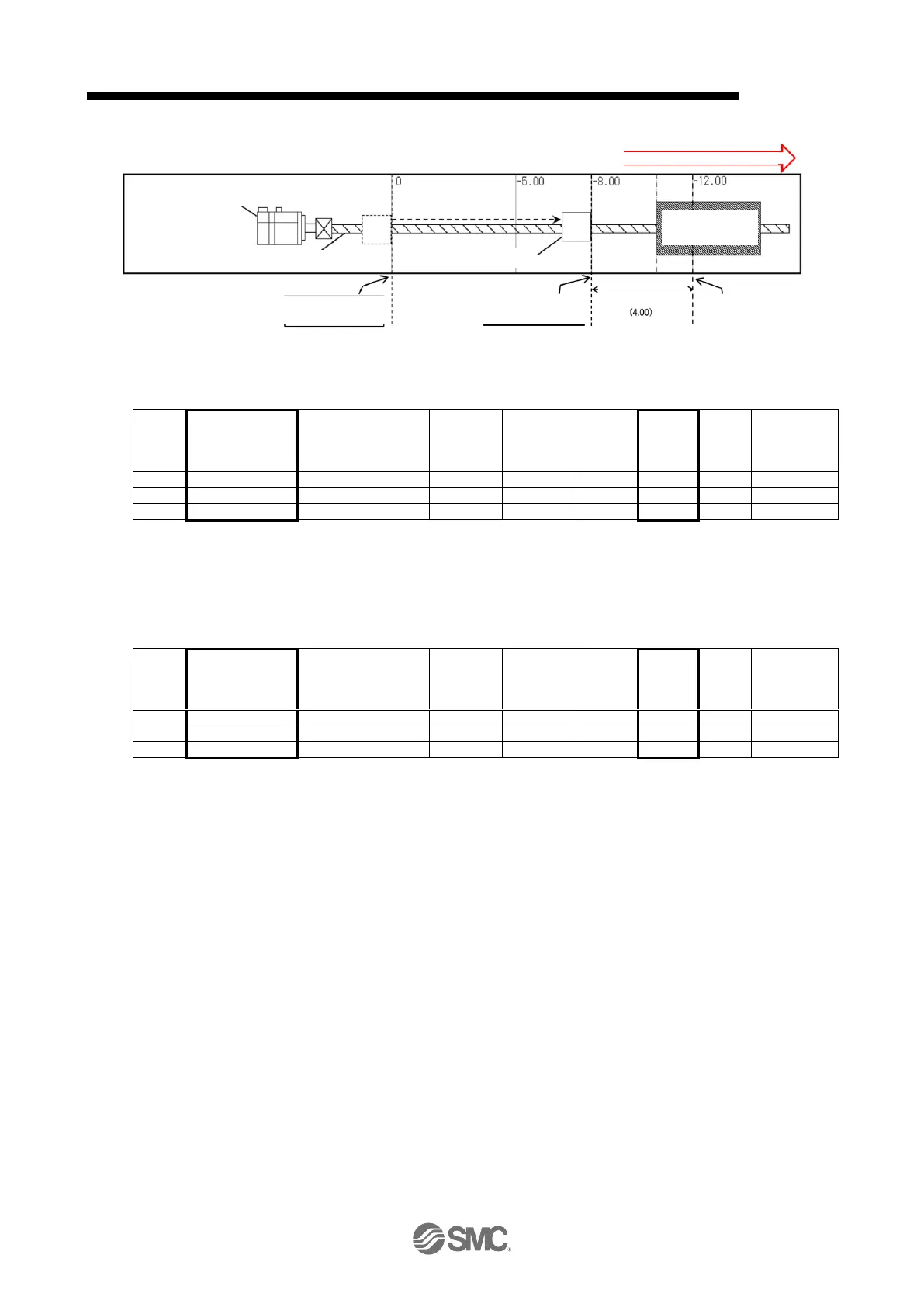
pushing start position
(Push-back detection position)
push limit position
(Missed swing detection
position)
(origin)
pushing start position
position address decreasing direction

 Loading...
Loading...