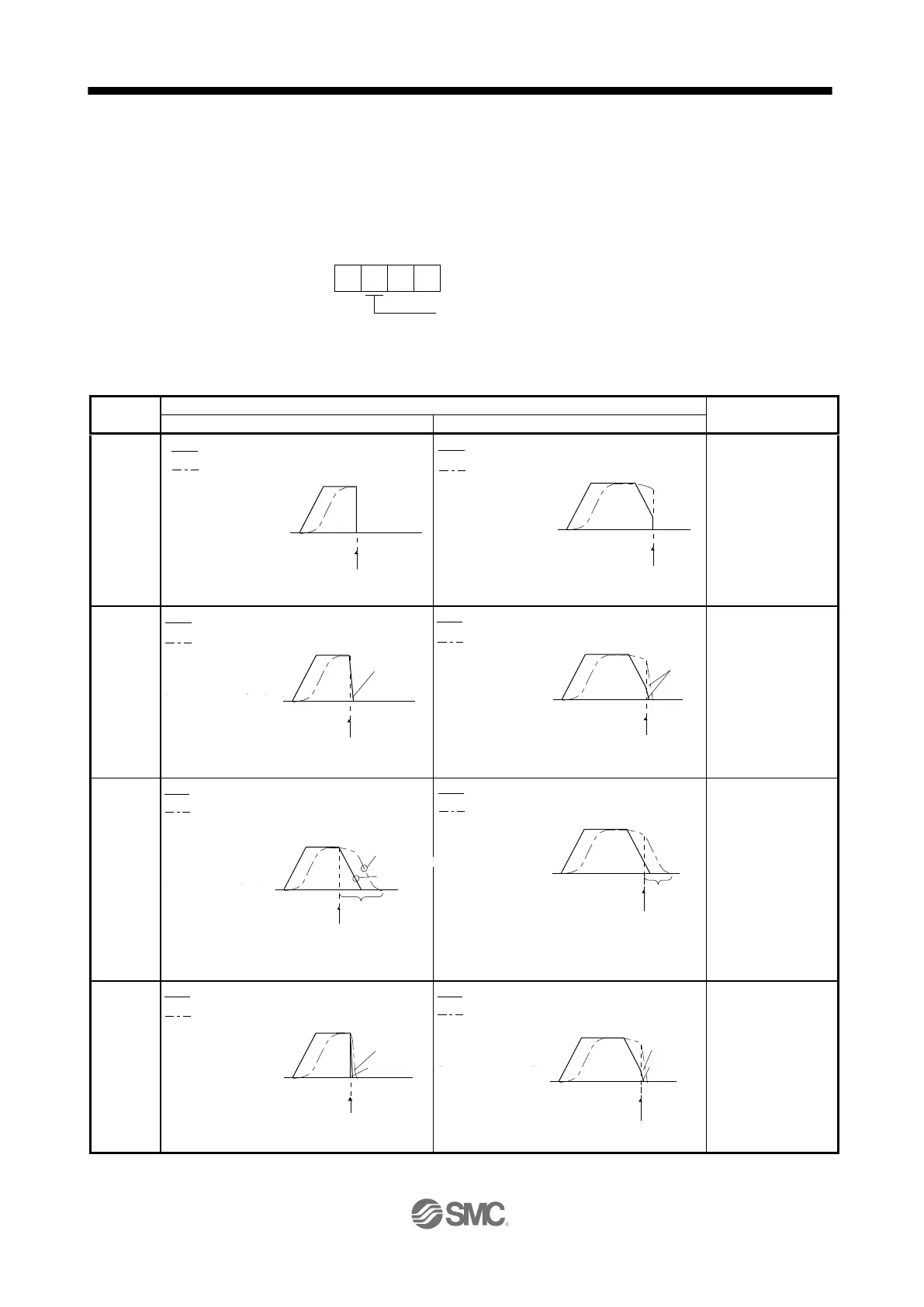
16.26 STOP METHOD AT SOFTWARE LIMIT DETECTION
Select a stop method of the servo motor for when a software limit ([Pr. PT15] to [Pr. PT18]) is detected with
the setting of the third digit in [Pr. PD30]. The software limit limits a command position controlled in the
driver. Therefore, actual stop position will not reach the set position of the software limit.
The software limit is disabled in the indexer method.
During rotation at constant speed
During deceleration to a stop
Erases the droop
pulses and stops the
motor.
Erases the home
position.
A difference will be
generated between
command position
and current position.
Perform a home
position return again.
Erases the droop
pulse portion and
stops the motor.
Erases the home
position.
A difference will be
generated between
command position
and current position.
Perform a home
position return again.
Decelerates to a stop
with the deceleration
time constant
currently selected
with the point table or
the program.
Continues operation
for a delay portion of
the S-pattern
acceleration/decelera
tion time constants.
Keeps the home
position.
Erases the droop
pulse portion and
stops the motor.
Continues operation
for a delay portion of
the S-pattern
acceleration/decelera
tion time constants.
Keeps the home
position.
Stop method selection at software limit detection
0: Quick stop (home position erased)
1: Slow stop (home position erased)
2: Slow stop (deceleration to a stop by deceleration time constant)
3: Quick stop (stop by clearing remaining distance)
[Pr. PD30]
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Software limit detection
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Software limit detection
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Software limit detection
Part of droop
pulses
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Software limit detection
Part of droop
pulses
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Software limit detection
Acceleration/
deceleration
time constant
+
S-pattern
acceleration/
deceleration
time constant
Decelerates to stop.
Acceleration/
deceleration
time constant
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Software limit detection
Continues
deceleration
to stop.
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Part of droop
pulses
Part of S-pattern
acceleration/
deceleration time
constants
+
Part of droop
pulses
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Software limit detection
Servo motor speed
(linear servo motor speed)
0 r/min
(0 mm/s)
Software limit detection
Part of S-pattern
acceleration/
deceleration time
constants
+
Part of droop
pulses
Part of droop
pulses
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration

 Loading...
Loading...