12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 22
12.6.5 How to process the absolute position data at detection of stroke end
The driver stops the acceptance of the command pulse when off of LSP or LSN are detected, clears the
droop pulses to 0 at the same time, and stops the servo motor. At this time, the programmable PC or
PLC...etc keeps outputting the command pulse. Since this causes a discrepancy between the absolute
position data of the driver and the programmable PC or PLC...etc, position mismatch will occur if the
operation is continued. To prevent this difference in position data from occurring, do as described below.
When the driver has detected the stroke end, perform JOG operation or the like to clear the stroke end.
After that, switch SON off once, then on again, or switch the power off once, then on again. This causes
the absolute position data of the driver to be transferred to the programmable PC or PLC...etc, restoring
the normal data.
12.7 Absolute position data transfer errors
When the following alarm or warning occurs, refer to "section 8" to remove the
failure.
[AL. 25 Absolute position erased]
[AL. 96 Home position setting warning]
[AL. E3 Absolute position counter warning]
[AL. E5 ABS time-out warning]
[AL. EA ABS servo-on warning]
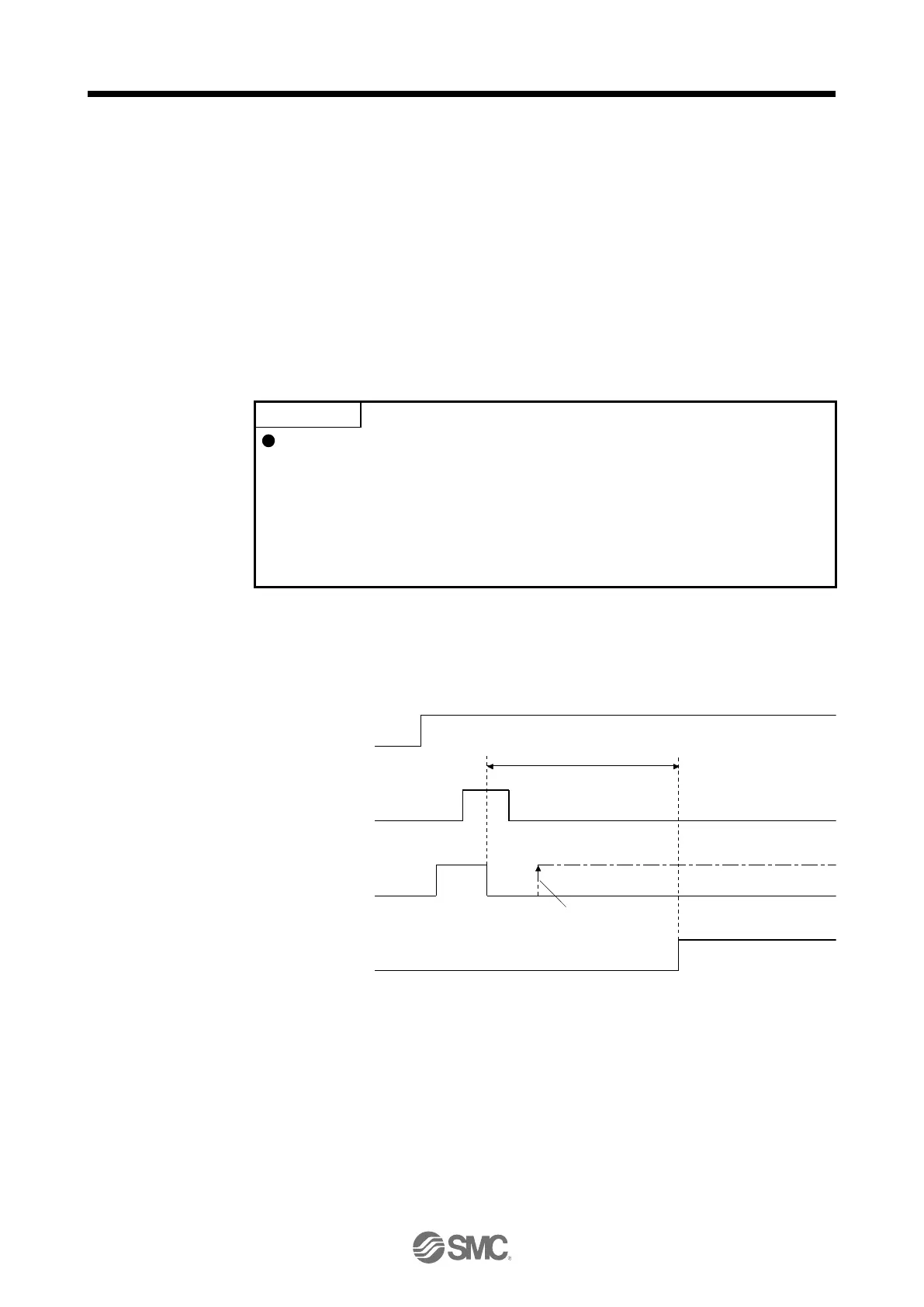
(1) The off period of the ABS transmission data ready signal output from the driver is checked. If the off
period is 1 s or longer, regard as a transfer fault and generate the ABS communication error. Generate
the ABS communication error if [AL. E5 ABS time-out warning] is generated at the driver due to an ABS
request on time time-out.
(2) The time required for the ABS transfer mode signal to go off after it has been turned on (ABS transfer
time) is checked. If the ABS transfer time is longer than 5 s, regard that a transfer fault has occurred, and

 Loading...
Loading...