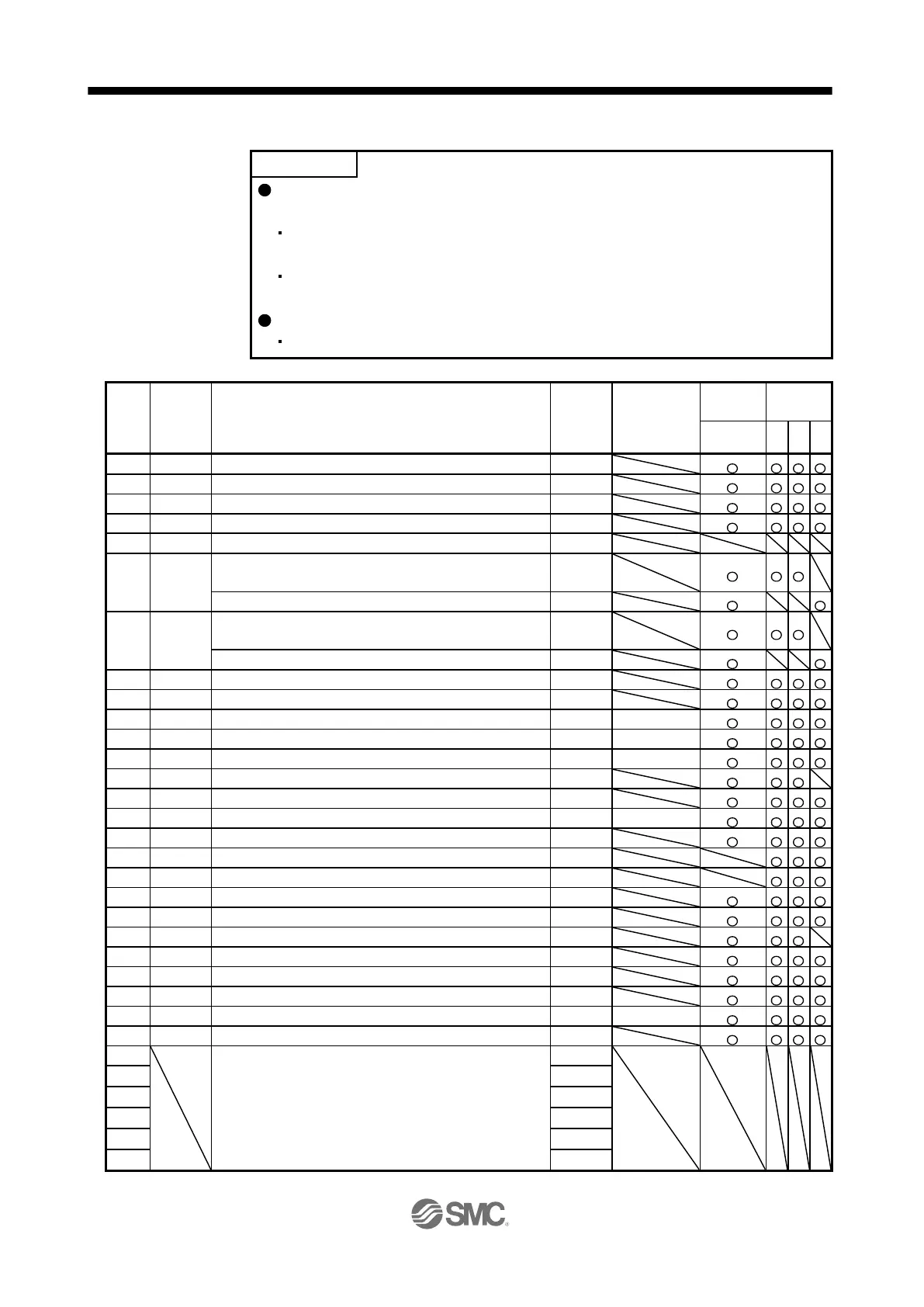
16.21.1 Basic setting parameters ([Pr. PA_ _ ])
To enable the following parameters in a positioning mode, cycle the power after
setting.
[Pr. PA06 Electronic gear numerator (command pulse multiplication
numerator)/Number of gear teeth on machine side]
[Pr. PA06 Electronic gear denominator (command pulse multiplication
denominator)/Number of gear teeth on servo motor side]
The following parameter cannot be used in the positioning mode.
[Pr. PA05 Number of command input pulses per revolution]
Absolute position detection system
Number of command input pulses per revolution
Electronic gear numerator (command pulse multiplication
numerator)
Number of gear teeth on machine side
Electronic gear denominator (command pulse multiplication
denominator)
Number of gear teeth on servo motor side
Forward rotation torque limit/positive direction thrust limit
Reverse rotation torque limit/negative direction thrust limit
Rotation direction selection/travel direction selection
Servo motor series setting
Parameter writing inhibit
Position control composition selection
Drive recorder arbitrary alarm trigger setting
One-touch tuning - Overshoot permissible level

 Loading...
Loading...