14. COMMUNICATION FUNCTION
14 - 6
14.2 Communication specifications
14.2.1 Outline of communication
Receiving a command, this driver returns data. The device which gives the command (e.g. personal
computer) is called a master station and the device (driver) which returns data in response to the command is
called a slave station. When fetching data successively, the master station repeatedly commands the slave
station to send data.
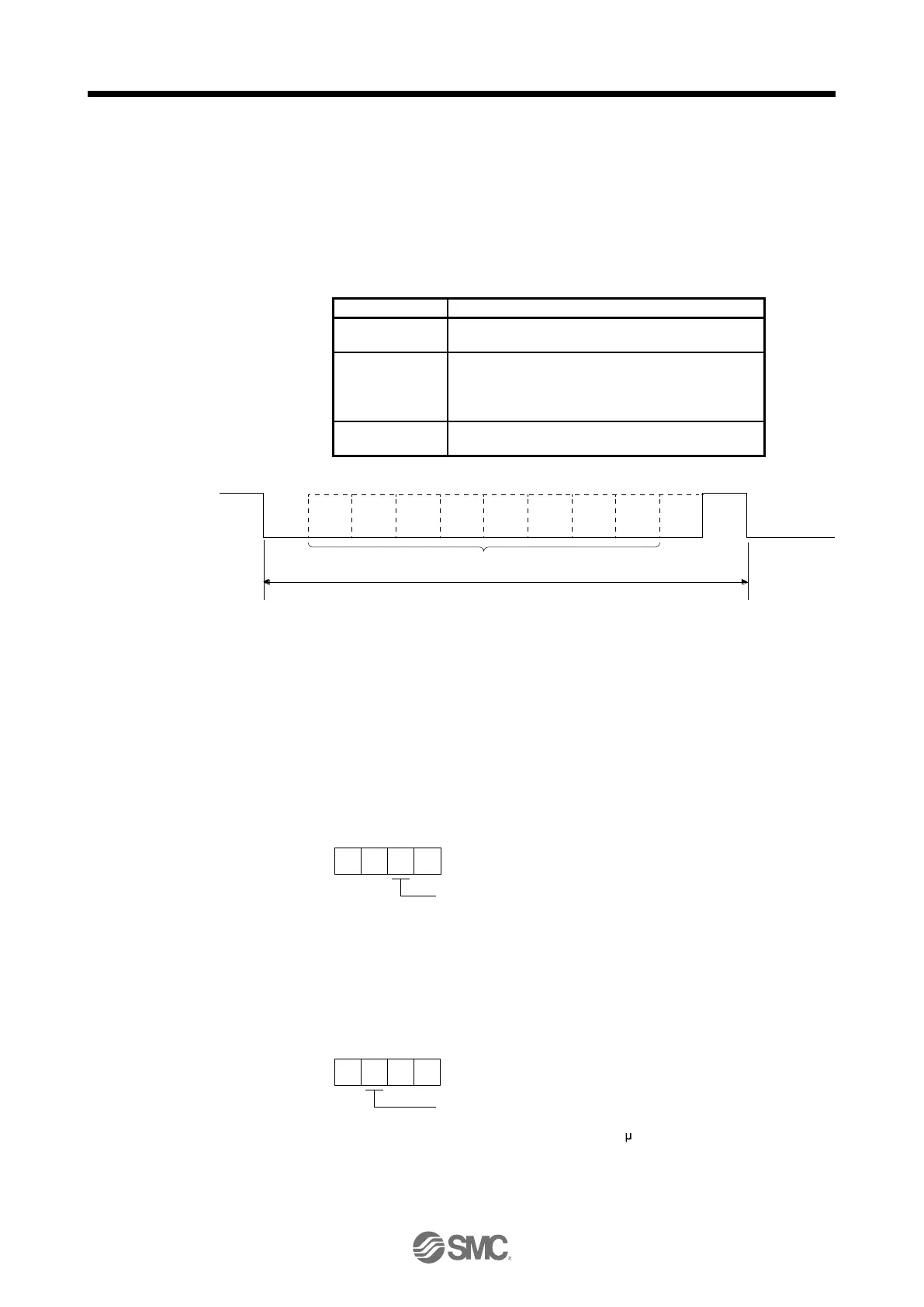
9600/19200/38400/57600/115200 asynchronous
system
Start bit
Data bit
Parity bit
Stop bit
1 bit
8 bits
1 bit (even)
1 bit
Half-duplex
communication method
1 frame (11 bits)
Data
Start 0 1 2 3 4 5 6 7 Parity Stop
Next
start
(LSB) (MSB)
14.2.2 Parameter setting
When the RS-422 communication function is used to operate the servo, set the communication specifications
of the driver with the parameters.
To enable the parameter values, cycle the power after setting.
(1) Serial communication baud rate
Select the communication speed. Match this value to the communication speed of the sending end
(master station).
Serial communication baud rate
0: 9600 [bps] 3: 57600 [bps]
1: 19200 [bps] 4: 115200 [bps]
2: 38400 [bps]
[Pr. PC21]
(2) RS-422 communication response delay time
Set the time from when the driver (slave station) receives communication data to when it returns data.
Set "0" to return data in less than 800 μs or "1" to return data in 800 μs or longer.
RS-422 communication response delay time
0: Disabled
1: Enabled (responding after 800
[Pr. PC21]
s or longer delay time)
(3) Station No. setting
Set the station No. of the driver to [Pr. PC20]. The setting range is station No. 0 to 31.

 Loading...
Loading...