16.18.2 Automatic operation mode 1 (rotation direction specifying indexer)
In this operation mode, the servo motor rotates in a fixed direction to execute positioning to a station.
The positioning is executed by selecting a station No. using 8-bit devices of the DI0 (Next station No.
selection 1) to DI7 (Next station No. selection 8). For the servo motor speed and acceleration/deceleration
time constant during operation, the values set in the point tables are used.
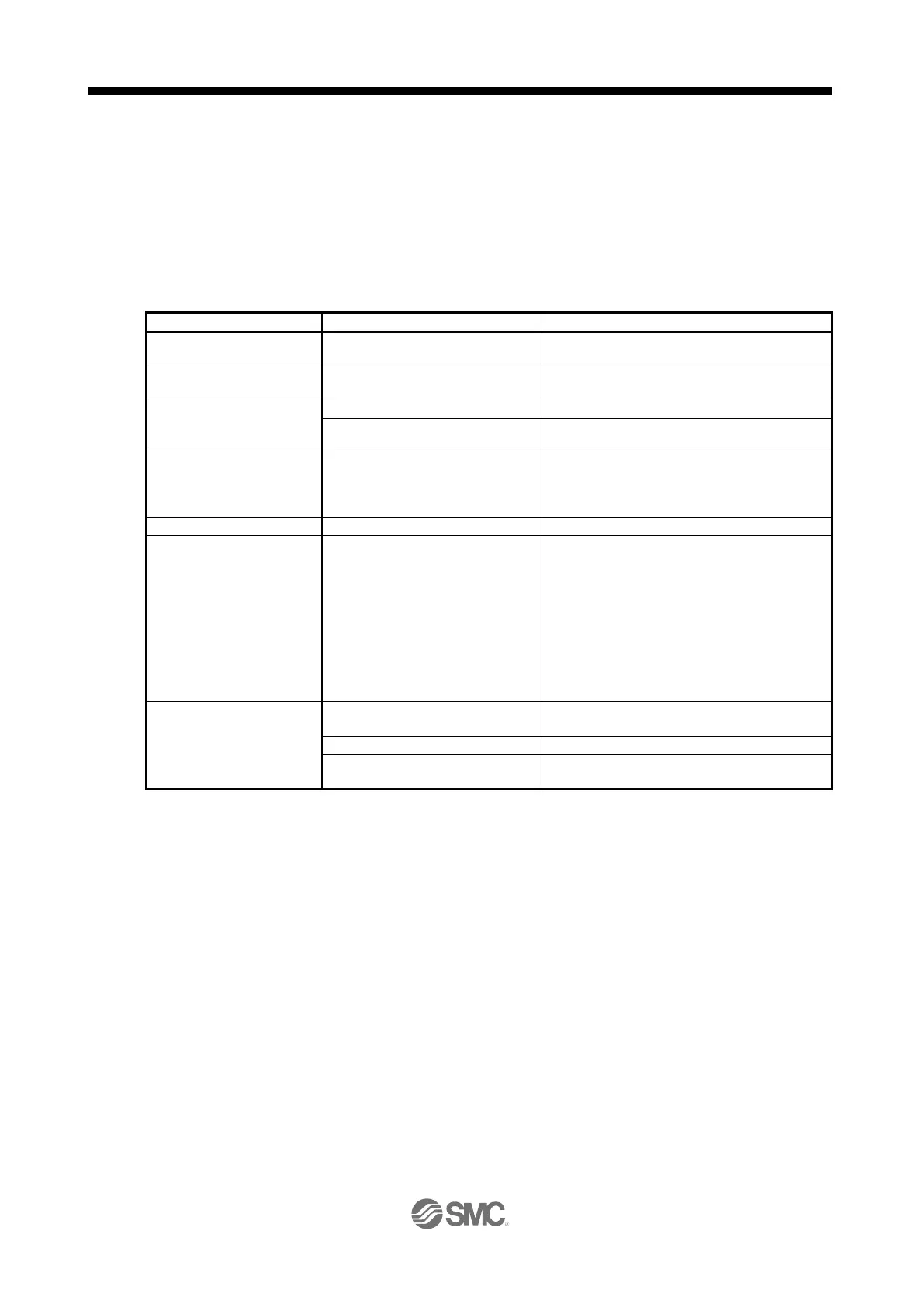
(1) Device/parameter
Set input devices and parameters as follows.
Control mode selection of [Pr. PA01]
Select "_ _ _ 8" (positioning mode (indexer
method)).
DI0 (Next station No. selection 1) to
DI7 (Next station No. selection 8)
Set any next station No. (Refer to (3) of this
section.)
Selecting automatic operation
mode 1 (rotation direction
specifying indexer)
MD0 (Operation mode selection 1)
MD1 (Operation mode selection 2)
Rotation direction selection
SIG (External limit/Rotation direction
decision/Automatic speed selection)
The rotation direction to a station No. will be as
follows.
Off: Station No. decreasing direction
On: Station No. increasing direction
Acceleration time
constant/Deceleration time
constant
RT (Second acceleration/deceleration
selection)
1. When RT is turned off
Acceleration time constant: setting value of [Pr.
PC01 Acceleration time constant 1]
Deceleration time constant: setting value of [Pr.
PC02 Deceleration time constant 1]
2. When RT is turned on
Acceleration time constant: setting value of [Pr.
PC30 Acceleration time constant 2]
Deceleration time constant: setting value of [Pr.
PC31 Deceleration time constant 2]
Set a torque limit value for during operation.
Set a torque limit value for during stop.
Set time to switch the torque limit value from
during operation until during stop.
The torque limit will change from [Pr. PC35 Internal torque limit 2] to the setting value of [Pr. PA11 Forward rotation
torque limit] or [Pr. PA12 Reverse rotation torque limit] when ST1 (Forward rotation start) is inputted. After MEND
(Travel completion) is outputted, the time has passed set with [Pr. PT39] and the torque limit will change from [Pr.
PA11 Forward rotation torque limit] or [Pr. PA12 Reverse rotation torque limit] to the setting value of [Pr. PC35 Internal
torque limit 2].

 Loading...
Loading...