17.Positioning mode (pushing operation)
11: Executes automatic continuous operation without stopping point table
number 1.
(3) When using this point table in pushing operation (absolute value command
method)
16: Pushing until the next point table is executed when ST1 (start signal) is
turned on
To keep driving. Set the Push limit position as an absolute value. Set
following the positioning operation using the auxiliary function "1" or "3".
(Note3) (Note4)
(4) When using this point table in pushing operation (incremental value
command method)
18: Pushing until the next point table is executed by turning on ST1 (start
signal)
To keep driving. Set the Push limit position by the increment value. Set
following the positioning operation using the auxiliary function "1" or "3".
(Note3) (Note4)
If a different rotation direction is set, the motor rotates in the reverse direction
after checking for smoothing zero (command output).
If "1" or "3" is set for point table number 255, [AL. 61] will be generated when
the point table is executed.
The first and second digits of the M code are output in 4-bit binary.
When the point table number including the pushing operation is started, no M
code is output.
Set the pushing torque (in units of [0.1%]).
This setting is valid when pushing operation is selected with auxiliary function
"" 16 "or" 18 ".
Set as the maximum torque = 1000 ([0.1%] unit).
If “0” (push torque 0.0%) is set, the push torque is disabled.
If the pushing torque exceeds the upper limit, the pushing torque is limited.
(For details, refer to section 5.7.2 (1) of this specification.)
When setting µm or inch, the decimal point position is changed by STM setting.
It does not support single pushing operation. [AL7F.4 Pushing start error] occurs when ST1 (start signal) is turned on by
specifying a point table No. with "16" or "18" set in the auxiliary function of point table data.
[AL7F.4 Pushing start error] will occur if a value other than “0” is set to the dwell of the point table immediately before the
pushing operation.
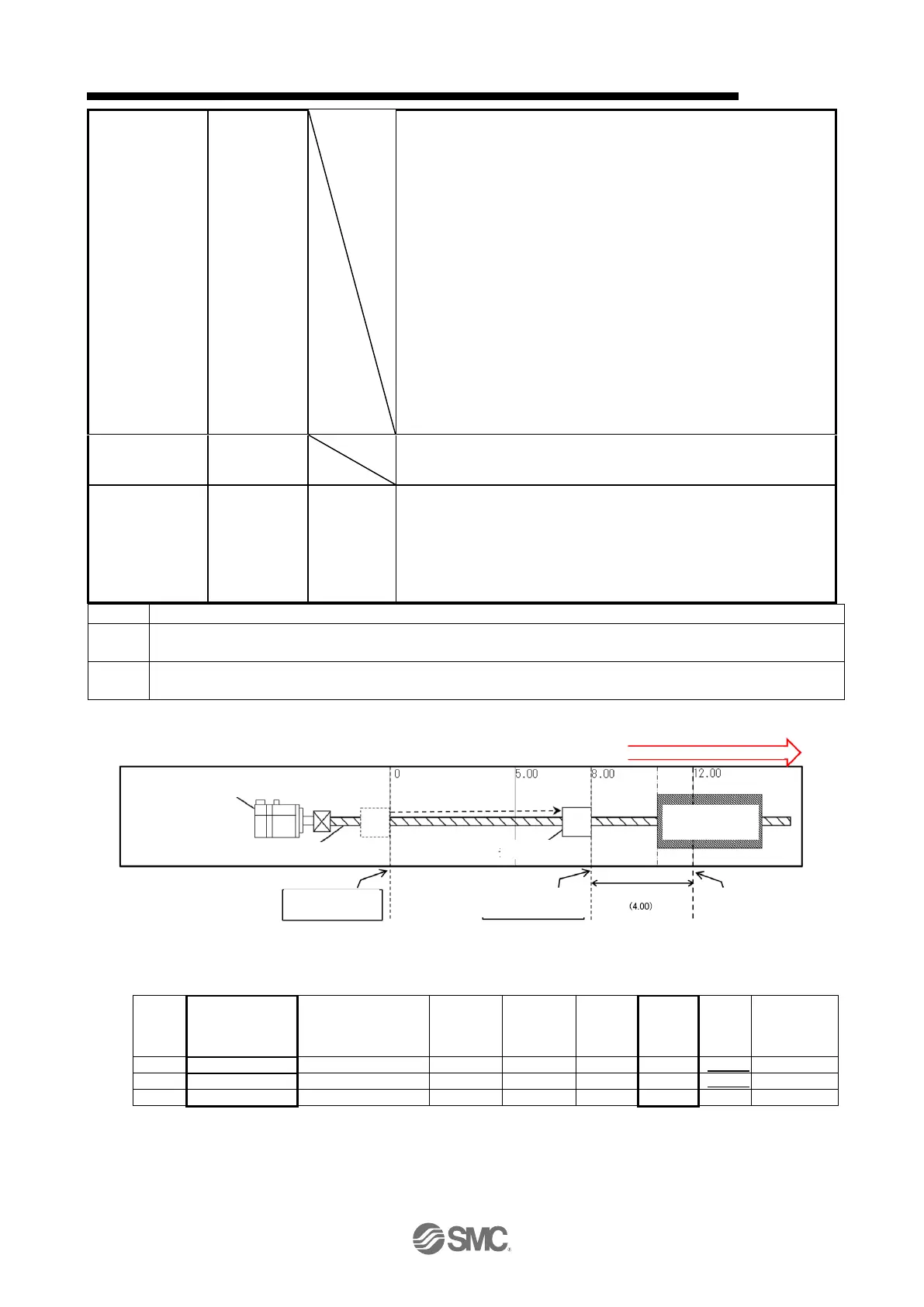
17.7.5 About pushing operation in the position address increasing direction
(1) Point table setting example
a) For positioning operation (absolute value command method) and pushing operation (absolute value
command method)
Position data /
Pushing limit
position
[10^stm μm]
Servo motor rotation
speed / speed limit
value
[r/min]
Acceleration
time
constant
[ms]
Deceleration
time
constant
[ms]
Note1: The set value of the point table becomes invalid. Refer to section 6.1.3 of this specification
for details.
b) For positioning operation (absolute value command method) and pushing operation (incremental
value command method)
positioning
start position
pushing start position
(Push-back detection position)
push limit position
(Missed swing detection
position)
position address increasing direction

 Loading...
Loading...