17.8.2 Push-back operation detection
If the current position reaches the Pushing start position during the pushing operation, a Pushing error
occurs, and the servomotor stops due to the dynamic brake (DB) stop (alarm [AL7F.2 Push back error]
occurs) or the servo lock stops (position lock). Stop. Select the stop method in parameter setting
([Pr.PS01] “_ _ x _”).
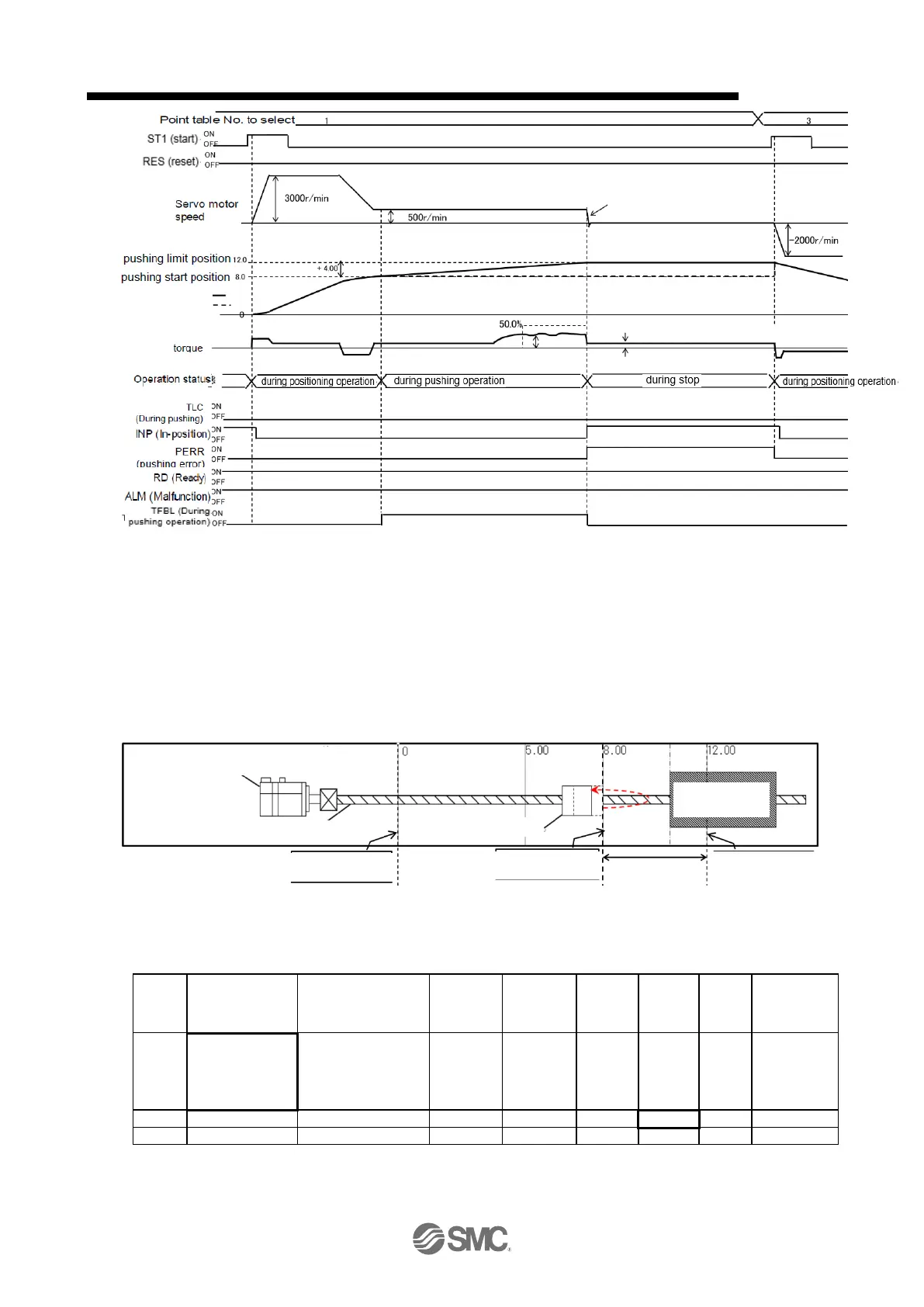
The pushing range is determined by the position data of the point table data / Push limit position.
Push-back detection position:Pushing start position
(Determined by the position data of the point table immediately before the
pushing operation point table)
(1) Point table setting example
a)For positioning operation (absolute value command method) and pushing operation (absolute value
command method)
Note1: The set value of the point table becomes invalid. Refer to section 6.1.3 of this
specification for details.。
 Loading...
Loading...