(2)Timing chart
a) Response during miss swing operation ([Pr.PS01] “_ _ _ 1” dynamic brake (DB) stop method)
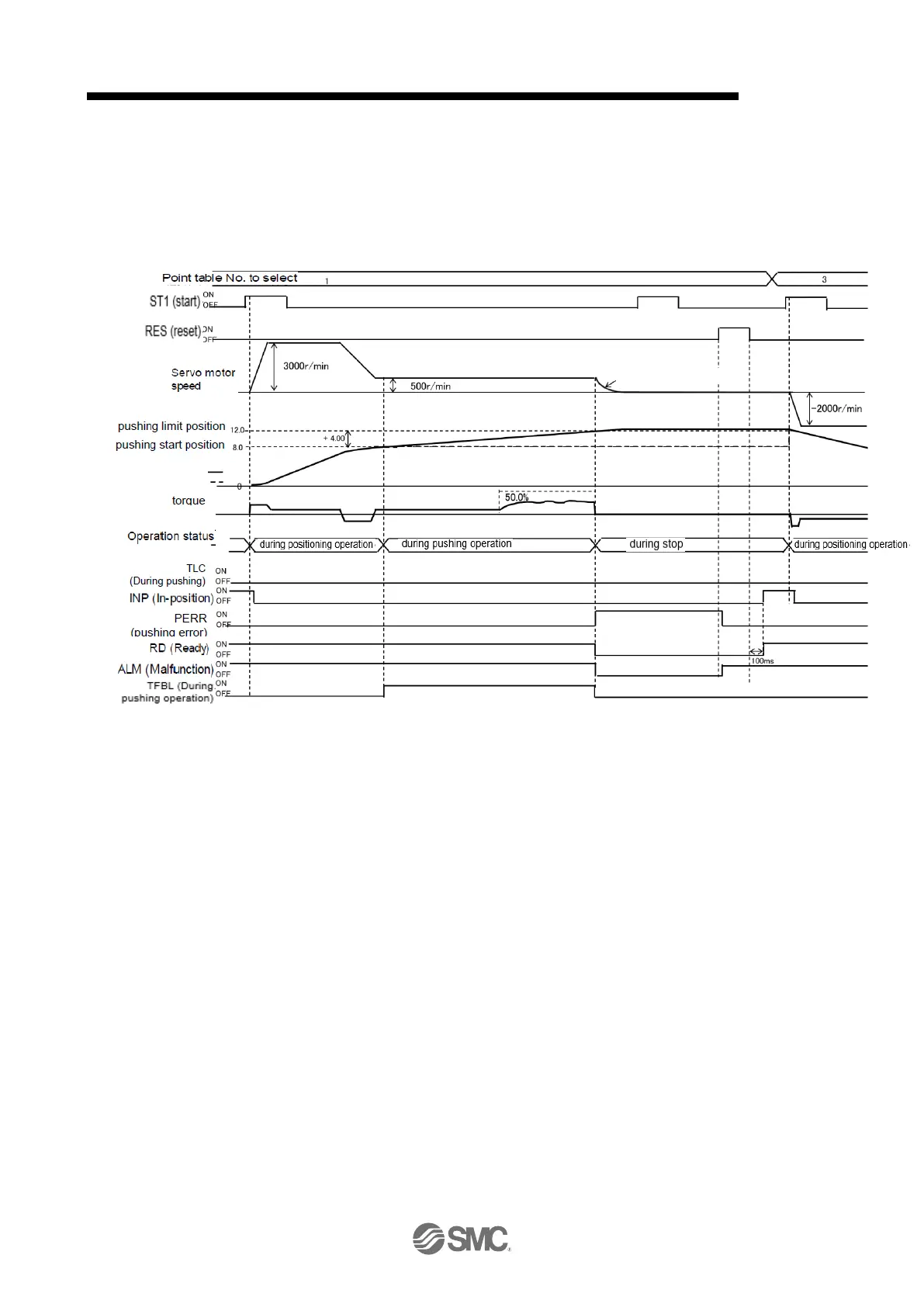
When the current position reaches the Push limit position during the pushing operation, PERR
(Pushing error) turns on, an alarm [AL7F.1 Pushing operation missed detection error] occurs, the
pushing operation is interrupted, and the dynamic brake is activated. Operates and stops the servo
motor.
RES (reset) resets the alarm and turns off PERR (Pushing error). PERR does not turn off with ST1
(start signal).
b) Response during miss swing operation ([Pr.PS01] “_ _ _ 0” servo lock stop method)
If the current position reaches the Push limit position during pushing operation, PERR (Pushing error)
turns on, pushing operation is interrupted, and the servo motor stops.
PER (Pushing error) is turned off by RES (reset) or ST1 (start signal).

 Loading...
Loading...