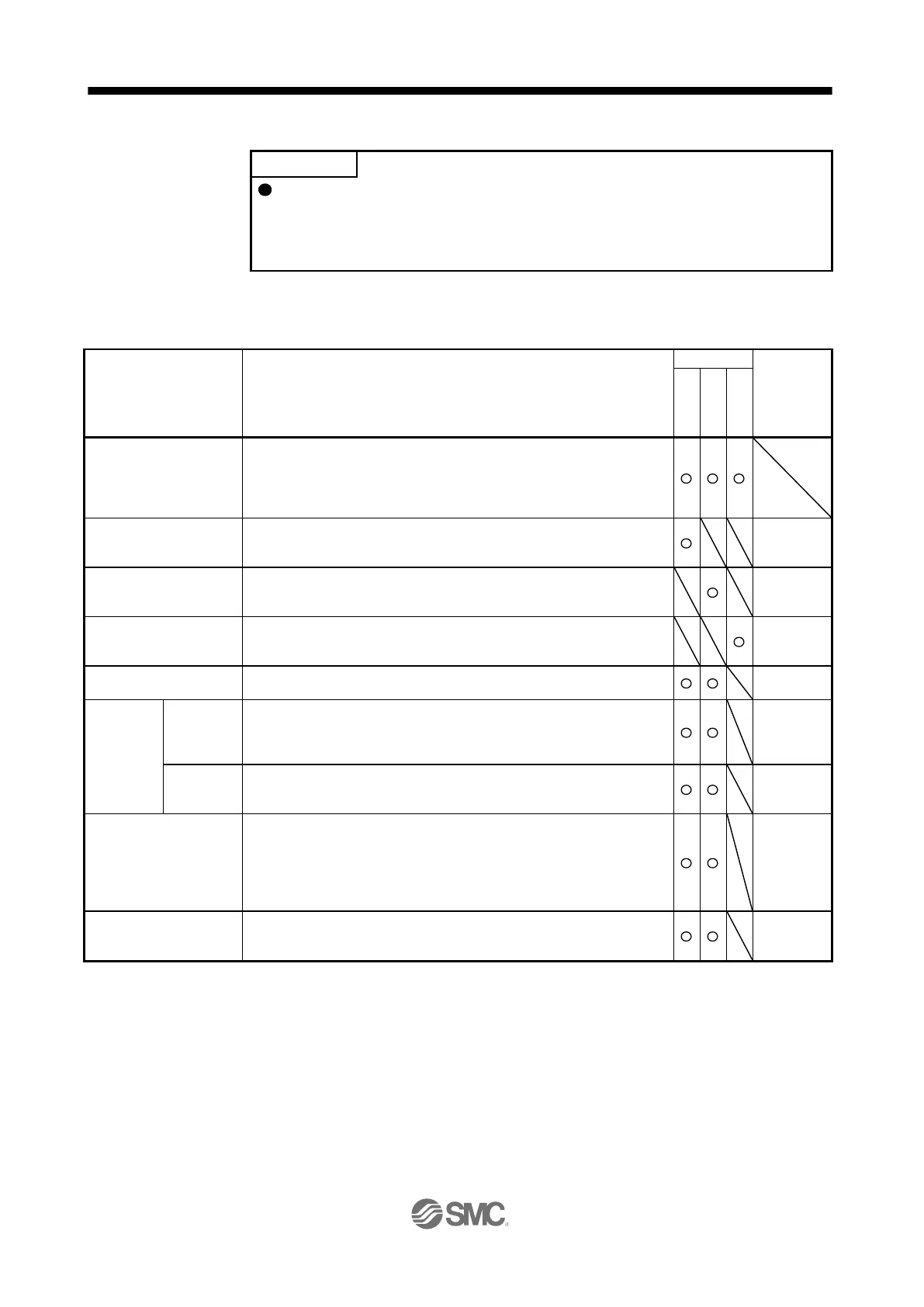
The symbols in the control mode column mean as follows.
CP: Positioning mode (point table method)
CL: Positioning mode (program method)
PS: Positioning mode (indexer method)
The following table lists the functions of this servo. For details of the functions, refer to each section
indicated in the detailed explanation field.
This function achieves a high response and stable control following the ideal
model. The two-degrees-of-freedom model adaptive control enables you to
set a response to the command and response to the disturbance separately.
Additionally, this function can be disabled. To disable this function, refer to
section 7.5.
Positioning mode
(point table method)
Set 1 to 255 point tables in advance, and select any point table to perform
operation in accordance with the set values. To select point tables, use
external input signals or communication function.
Positioning mode
(program method)
Set 1 to 256 programs in advance and select any program to perform
operation in accordance with the programs. To select programs, use
external input signals or communication function.
Positioning mode
(indexer method)
Set 2 to 255 divided stations in advance to perform operation to the station
positions. To select station positions, use external input signals or
communication function.
Roll feed display function
Positions based on specified travel distance from a status display "0" of
current/command positions at start.
Current
position
latch
function
When the mark detection signal turns on, the current position is latched. The
latched data can be read with communication commands.
Interrupt
positioning
function
When MSD (Mark detection) turns on, this function converts the remaining
distance to the travel amount set in [Pr. PT30] and [Pr. PT31] (Mark sensor
stop travel distance).
Infinite feed function
(setting degree)
When the unit of position data of the automatic operation or manual
operation is set to degree, the detection of [AL. E3.1 Multi-revolution counter
travel distance excess warning] is disabled and the home position is retained
even if the servo motor rotates 32768 revolutions or more are in the same
direction. Thus, the current position is restored after the power is cycled.
This function can be used with the absolute position detection system.
This function enables the encoder following function, mark sensor input
compensation function, synchronous operation using positioning data, and
synchronous interpolation operation.

 Loading...
Loading...