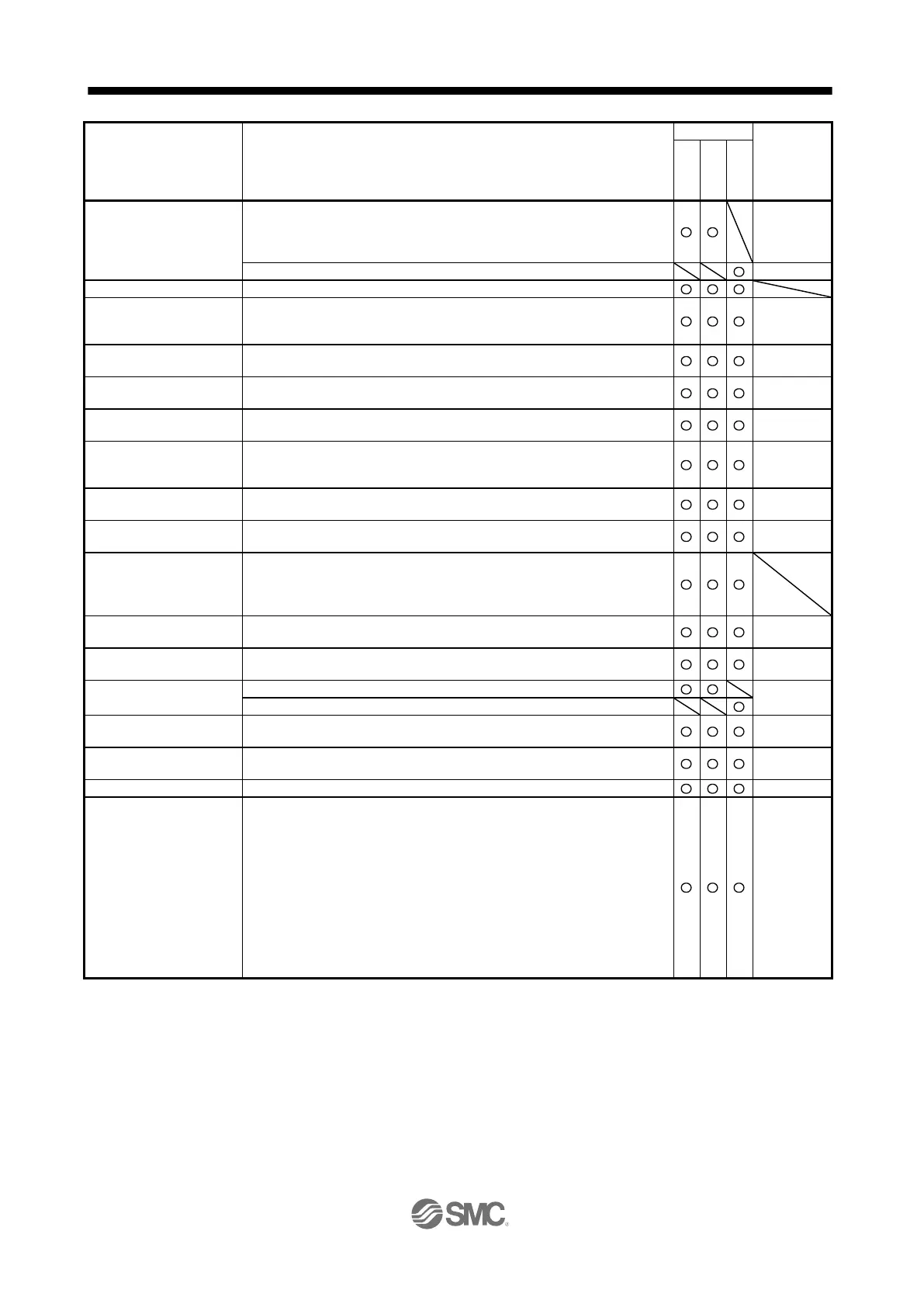
Dog type/count type/data setting type/stopper type/home position
ignorance/dog type rear end reference/count type front end reference/dog
cradle type/dog type last Z-phase reference/dog type Z-phase
reference/dogless Z-phase reference
Torque limit changing dog type/torque limit changing data set type
The encoder resolution of the rotary servo motor will be 262144 pulses/rev.
Absolute position
detection system
Home position return is required only once, and not required at every power-
on. Only "12.1 Summary" and "12.2 Battery" will be appropriate references
for the positioning mode.
You can switch gains during rotation/stop, and can use input devices to
switch gains during operation.
Advanced vibration
suppression control II
This function suppresses vibration at the arm end or residual vibration.
Machine resonance
suppression filter
This is a filter function (notch filter) which decreases the gain of the specific
frequency to suppress the resonance of the mechanical system.
Shaft resonance
suppression filter
When a load is mounted to the servo motor shaft, resonance by shaft torsion
during driving may generate a mechanical vibration at high frequency. The
shaft resonance suppression filter suppresses the vibration.
Driver detects mechanical resonance and sets filter characteristics
automatically to suppress mechanical vibration.
Suppresses high-frequency resonance which occurs as servo system
response is increased.
Machine analyzer function
Analyzes the frequency characteristic of the mechanical system by simply
connecting an Setup software (MR Configurator2
TM
) installed personal
computer and driver.
Setup software (MR Configurator2
TM
) is necessary for this function.
This function provides better disturbance response in case low response
level that load to motor inertia ratio is high for such as roll send axes.
Slight vibration
suppression control
Suppresses vibration of ±1 pulse generated at a servo motor stop.
Position commands can be multiplied by 1/864 to 33935.
Position commands can be multiplied by 1/9999 to 9999.
Automatically adjusts the gain to optimum value if load applied to the servo
motor shaft varies.
Used when the built-in regenerative resistor of the driver does not have
sufficient regenerative capability for the regenerative power generated.
Alarm history is cleared.
Input signal selection
(device settings)
ST1 (Forward rotation start), ST2 (Reverse rotation start), and SON (Servo-
on) and other input device can be assigned to any pins.
[Pr. PD04]
[Pr. PD06]
[Pr. PD08]
[Pr. PD10]
[Pr. PD12]
[Pr. PD14]
[Pr. PD18]
[Pr. PD20]
[Pr. PD22]
[Pr. PD44]
[Pr. PD46]

 Loading...
Loading...