16.20.4 Backlash compensation and digital override
(1) Backlash compensation
When executing a positioning reversely to the direction to the home position return, set [Pr. PT14
Backlash compensation] to stop the shaft at the compensated position for the setting value.
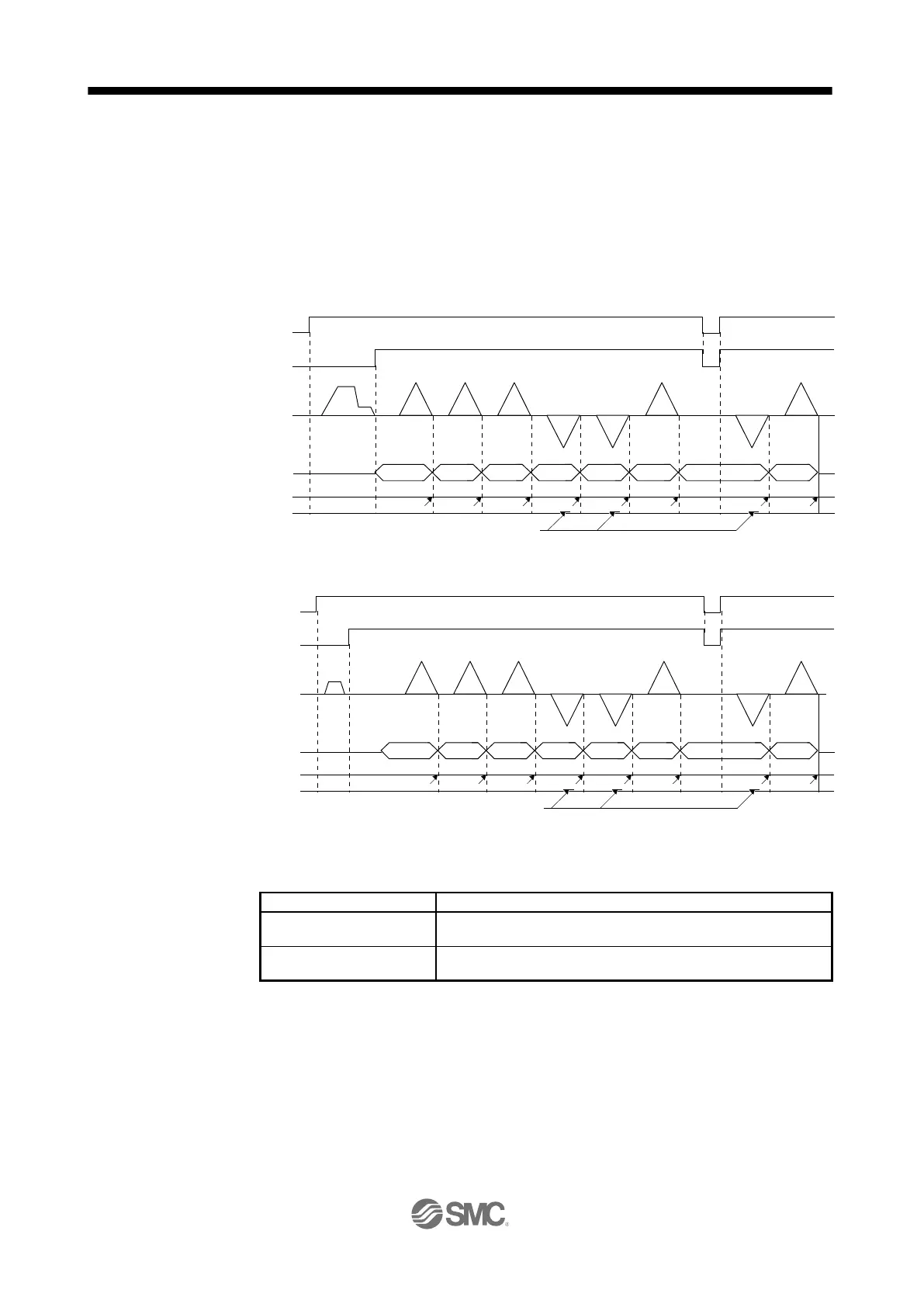
When the travel distance between stations is set to 1000 and the backlash compensation is set to 10 in
the absolute position detection system, the timing chart is as follows.
(a) Torque limit changing dog type home position return
(b) Torque limit changing data set type
Backlash is compensated to the direction set with [Pr. PT38] regardless of a JOG operation ( 1)) or
disturbance after power-on.
Executes backlash compensation assuming a command to the CW
rotation direction before home position return.
Executes backlash compensation assuming a command to the CCW
rotation direction before home position return.
Servo motor speed
ZP
(Home position return completion)
ON
OFF
ON
OFF
Forward rotation
0 r/min
Reverse rotation
Power supply
DI0 (Next station No. selection 1) to
DI7 (Next station No. selection 8)
Servo motor current position 1000 2000 2000 20003000 2000-10 1000-10 1000-10
No. 1No. 1No. 1 No. 3 No. 2No. 2 No. 2No. 2
Backlash compensation
Servo motor speed
ZP
(Home position return completion)
ON
OFF
ON
OFF
Forward rotation
0 r/min
Reverse rotation
Power supply
DI0 (Next station No. selection 1) to
DI7 (Next station No. selection 8)
Servo motor current position 1000 2000 2000 20003000 2000-10 1000-10 1000-10
No. 1No. 1No. 1 No. 3 No. 2No. 2 No. 2No. 2
Backlash compensation
1)

 Loading...
Loading...