(2) Digital override
Setting [Pr. PT38] to "_ _ 1 _" enables the digital override function.
Actual servo motor speed will be the value multiplying the command speed by the digital override
selected with OV0 (Digital override selection 1) to OV3 (Digital override selection 4). This is enabled with
all the operation modes.
Example) [Pr. PT42]: 50, [Pr. PT43]: 5
100 [%] of parameter setting speed
50 [%] of parameter setting speed
55 [%] of parameter setting speed
60 [%] of parameter setting speed
110 [%] of parameter setting speed
115 [%] of parameter setting speed
0 [%] of parameter setting speed
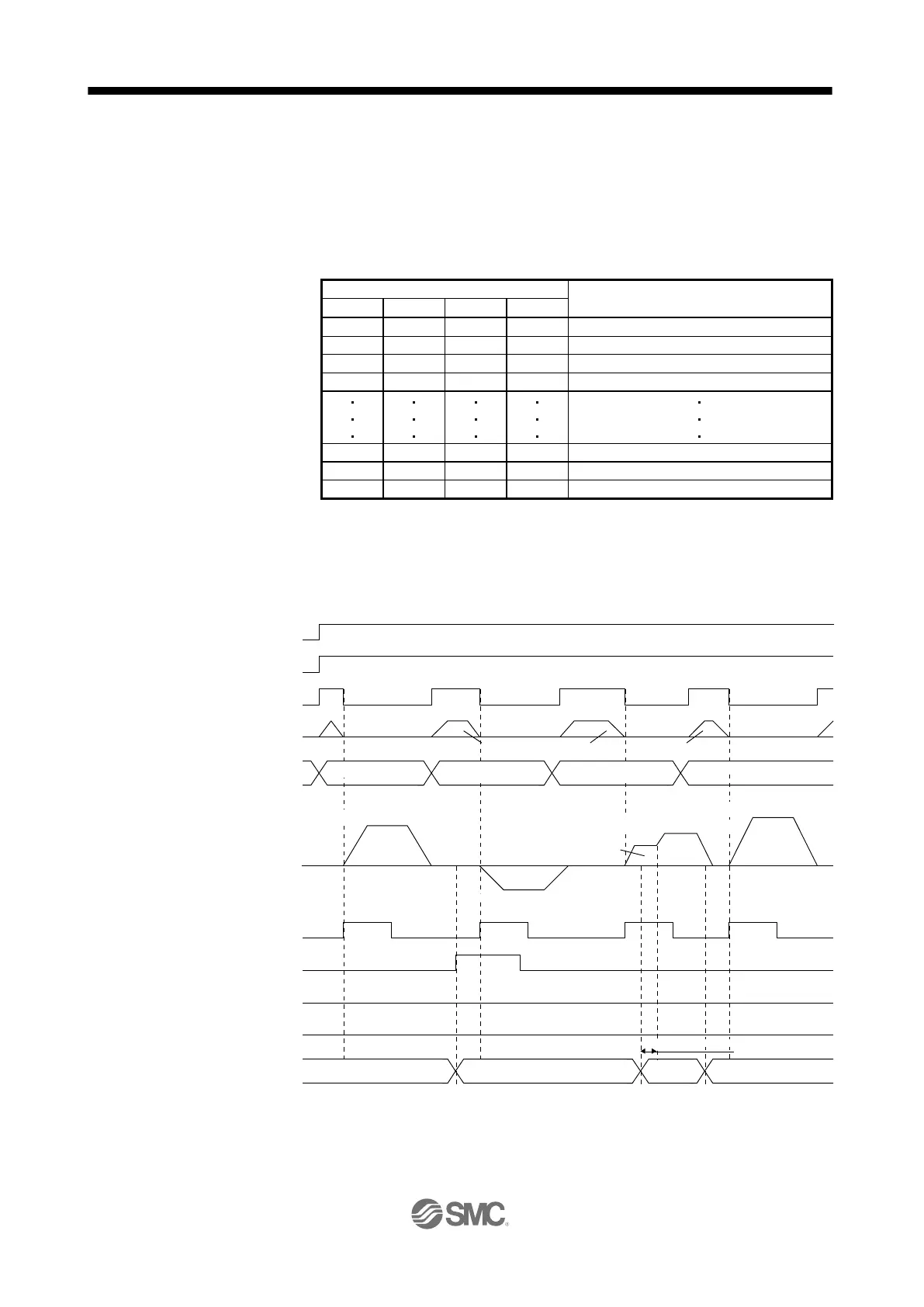
(a) When [Pr. PT42] is set to 50 and [Pr. PT43] to 5 in the automatic operation mode 1 (Rotation
direction specifying indexer), the chart will be as follows.
Servo motor speed
ALM (Malfunction)
ON
OFF
ON
OFF
MEND (Travel completion)
ON
OFF
PS0 (Station output 1) to
PS7 (Station output 8)
(Note)
ST1 (Forward rotation start)
ON
OFF
SIG (External limit/Rotation direction
decision/Automatic speed selection)
ON
OFF
MD0 (Operation mode selection 1)
ON
OFF
MD1 (Operation mode selection 2)
OV0 (Digital override selection 1) to
OV3 (Digital override selection 4)
ON
OFF
Forward rotation
0 r/min
Reverse rotation
Power supply
DI0 (Next station No. selection 1) to
DI7 (Next station No. selection 8)
Station
position No. 3
Station
position No. 1
Station position
No. 3
All off All off All off All off
Digital override: 100% Digital override: 50% Digital override: 115%
Digital override:
85%
3.5 ms or shorter
Next station No. 1 Next station No. 3 Next station No. 1 Next station No. 3
Digital override: 115%
Digital override: 100%
Digital override: 50%
Station
output 1
Station
output 3
Station output 1
Station position No. 1
Digital override: 85%
 Loading...
Loading...