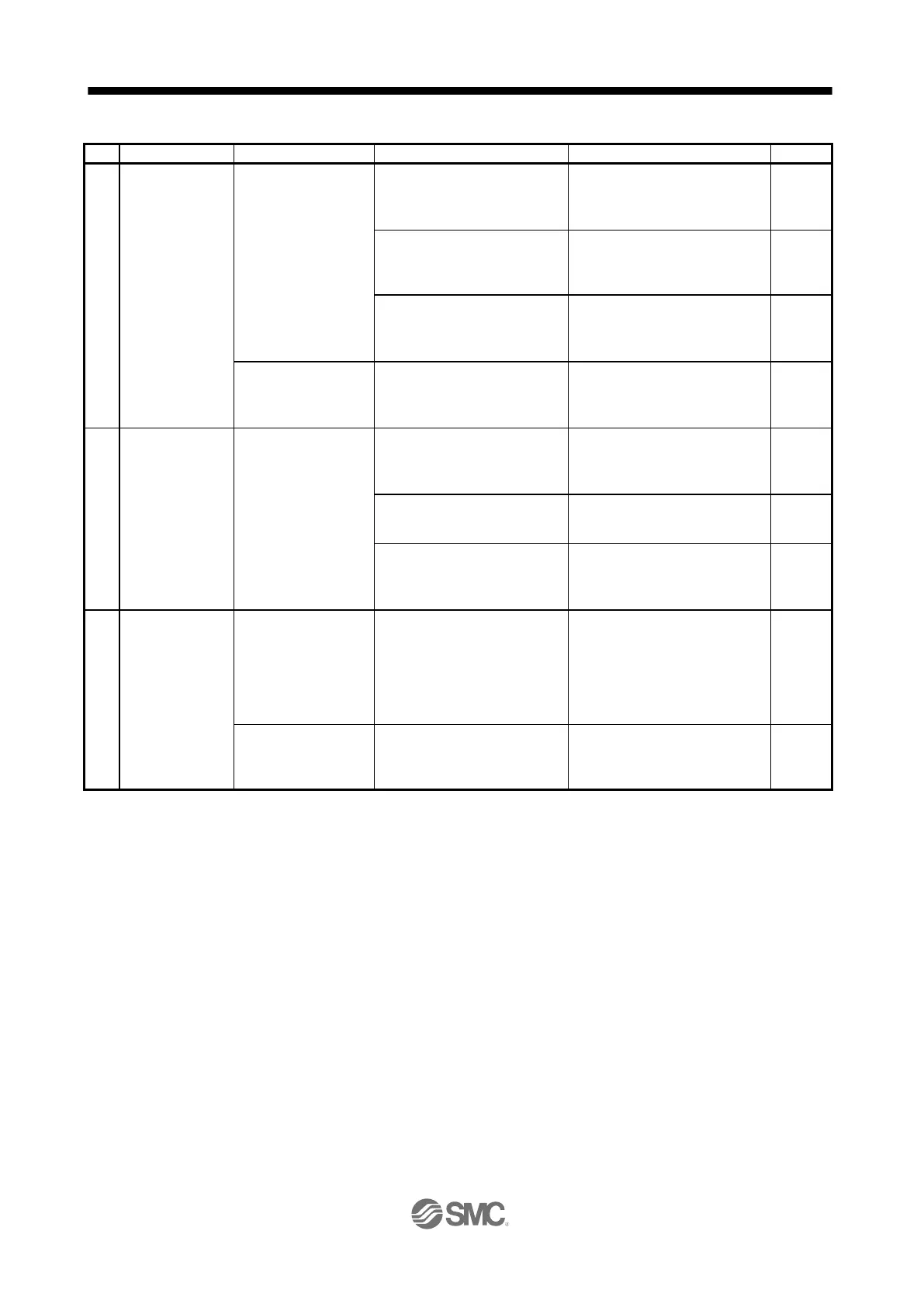
Perform a home
position return.
Servo motor does not
rotate.
Call the external I/O signal
display and check the on/off
status of the input signal. (Refer
to section 3.1.7 or 3.2.7.)
LSP, LSN, and ST1 are off.
Section
3.1.7
Section
3.2.7
Check [Pr. PA11 Forward
rotation torque limit] and [Pr.
PA12 Reverse rotation torque
limit].
Torque limit level is too low as
compared to the load torque.
When TLA (Analog torque limit)
is usable, check the input voltage
on the status display.
Torque limit level is too low as
compared to the load torque.
Section
3.1.2
Section
3.2.2
The home position
return is not completed.
Call the external I/O signal
display and check the on/off
status of input signal DOG.
(Refer to section 3.1.7 or 3.2.7.)
The proximity dog is set
incorrectly.
Section
3.1.7
Section
3.2.7
Switch on ST1
(Forward rotation
start) or ST2
(Reverse rotation
start).
Servo motor does not
rotate.
Call the external I/O signal
display (section 3.1.7 or 3.2.7)
and check the on/off status of the
input signal.
LSP, LSN, ST1, and ST2 are off.
Section
3.1.7
Section
3.2.7
Check [Pr. PA11 Forward rotation
torque limit] and [Pr. PA12
Reverse rotation torque limit].
Torque limit level is too low as
compared to the load torque.
When TLA (Analog torque limit) is
usable, check the input voltage on
the status display.
Torque limit level is too low as
compared to the load torque.
Section
3.1.2
Section
3.2.2
Rotation ripples (speed
fluctuations) are large
at low speed.
Make gain adjustment in the
following procedure.
1. Increase the auto tuning
response level.
2. Repeat acceleration/
deceleration more than three
times to complete auto tuning.
Large load inertia
moment causes the
servo motor shaft to
oscillate side to side.
If the servo motor may be driven
with safety, repeat acceleration
and deceleration three times or
more to complete the auto tuning.

 Loading...
Loading...