PA09
RSP
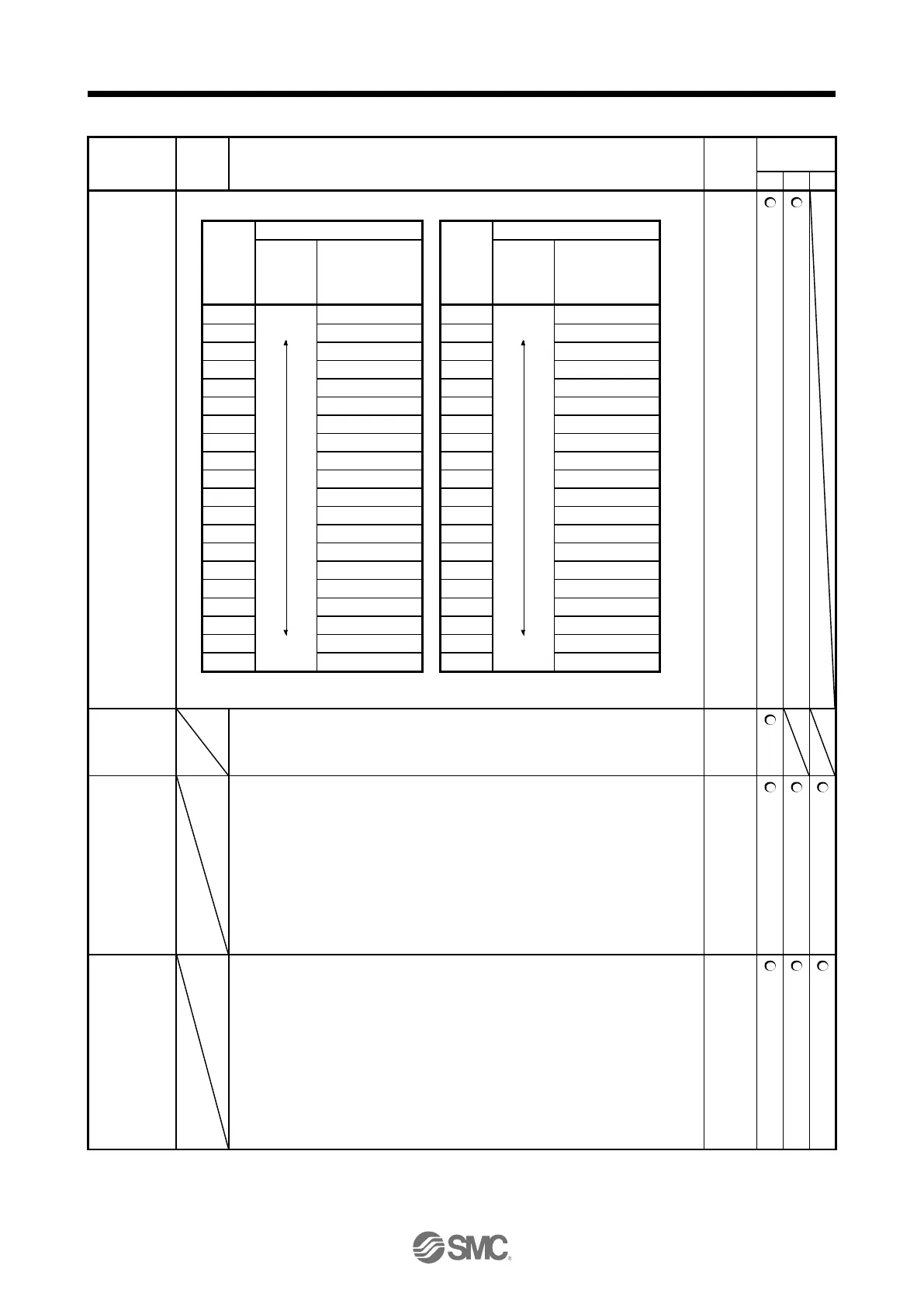
Auto tuning
response
Set a response of the auto tuning.
Guideline for
machine
resonance
frequency [Hz]
Guideline for
machine
resonance
frequency [Hz]
Low
response
Middle
response
Middle
response
High
response
PA10
INP
In-position
range
Set an in-position range per command pulse.
To change it to the servo motor encoder pulse unit, set [Pr. PC24].
Setting range: 0 to 65535
PA11
TLP
Forward
rotation
torque
limit/positive
direction
thrust limit
You can limit the torque or thrust generated by the servo motor. Set the parameter
referring to section 3.6.1 (5).
When you output torque or thrust as analog monitor output, the larger value of [Pr.
PA11 Forward rotation torque limit value] or [Pr. PA12 Reverse rotation torque limit
value] will be the maximum output voltage (8 V).
Set the parameter on the assumption that the maximum torque or thrust is 100.0
[%]. The parameter is for limiting the torque of the servo motor in the CCW power
running or CW regeneration or negative direction regeneration. Set this parameter
to "0.0" to generate no torque or thrust.
Setting range: 0.0 to 100.0
PA12
TLN
Reverse
rotation
torque
limit/negative
direction
thrust limit
You can limit the torque generated by the servo motor. Set the parameter referring
to section 3.6.1 (5).
When you output torque with analog monitor output, the larger value of [Pr. PA11
Forward rotation torque limit value] or [Pr. PA12 Reverse rotation torque limi value]
will be the maximum output voltage (8 V).
Set the parameter on the assumption that the maximum torque is 100.0 [%]. The
parameter is for limiting the torque of the servo motor in the CW power running or
CCW regeneration, or limiting the thrust of the linear servo motor in the positive
direction power running or negative direction regeneration. Set this parameter to
"0.0" to generate no torque or thrust.
Setting range: 0.0 to 100.0
 Loading...
Loading...