Set the constant of a primary delay to the position command.
You can select a control method from "Primary delay" or "Linear
acceleration/deceleration" of "Position acceleration/deceleration filter type selection"
in [Pr. PB25]. When the linear acceleration/deceleration is selected, the setting
range is 0 ms to 10 ms. Setting of longer than 10 ms will be recognized as 10 ms.
When the linear acceleration/deceleration is selected, do not set the "Control mode
selection" ([Pr. PA01]) to the setting other than "_ _ _ 0". Doing so will cause the
servo motor or linear servo motor to make a sudden stop at the time of position
control mode switching or restart.
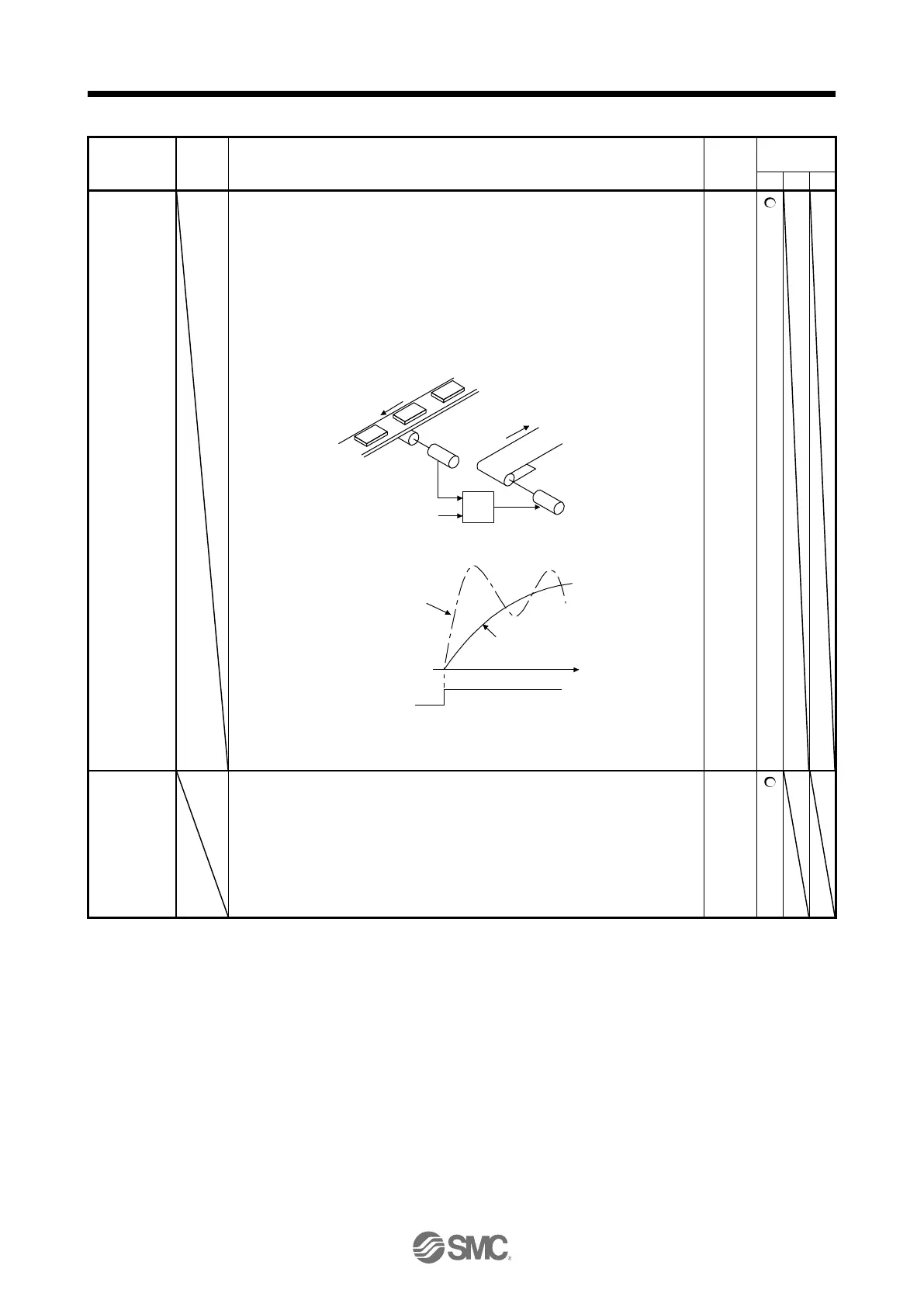
(Example) When a command is given from a synchronizing encoder, synchronous
operation will start smoothly even if it start during line operation.
Set the feed forward gain.
When the setting is 100%, the droop pulses during operation at constant speed are
nearly zero. When the super trace control is enabled, constant speed and uniform
acceleration/deceleration droop pulses will be almost 0. However, sudden
acceleration/deceleration will increase the overshoot. As a guideline, when the feed
forward gain setting is 100%, set 1 s or more as the acceleration time constant up
to the rated speed.
Setting range: 0 to 100

 Loading...
Loading...