6. NORMAL GAIN ADJUSTMENT
6 - 10
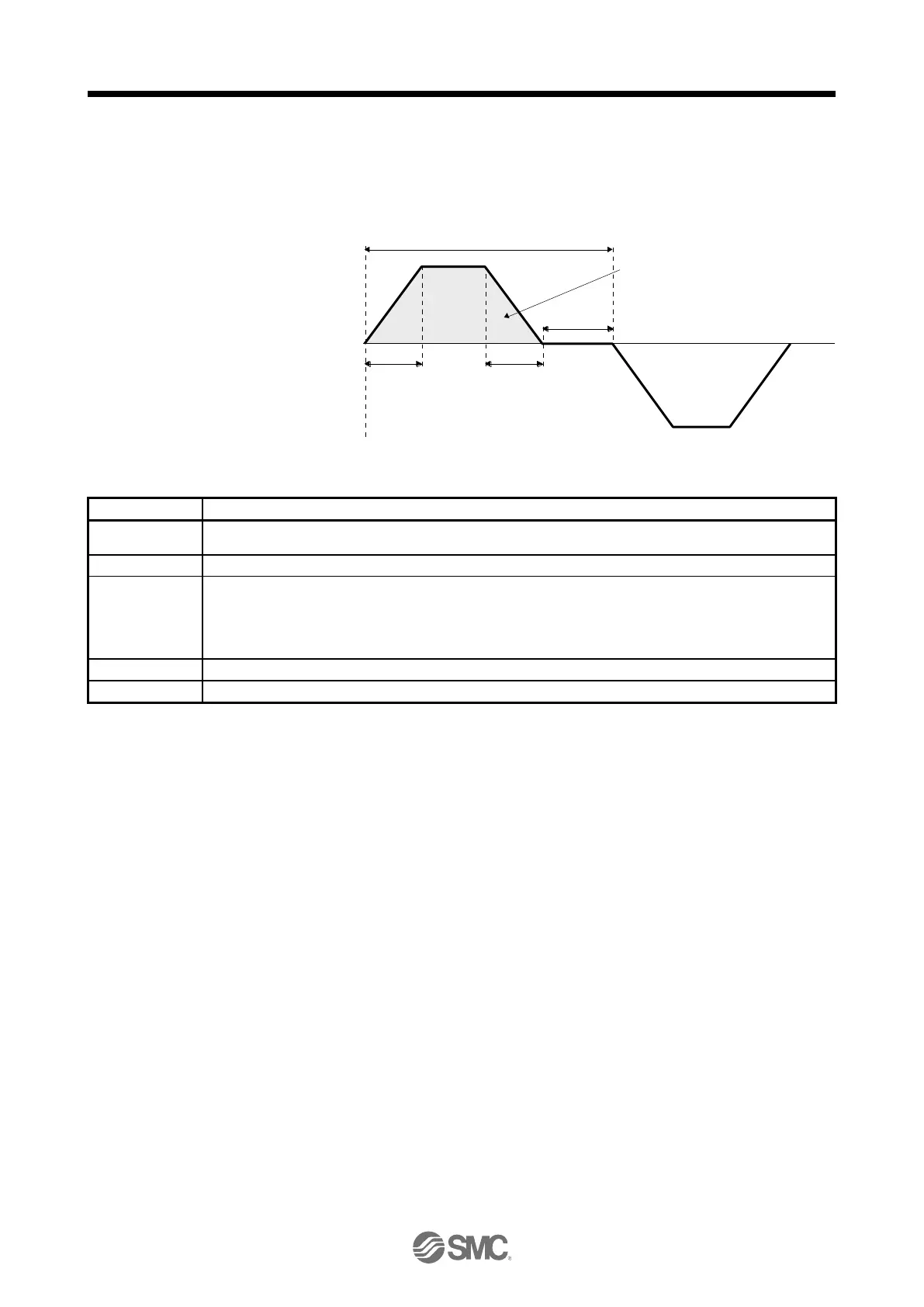
1) User command method
It is recommended to input commands meeting the following conditions to the driver. If one-touch
tuning is executed while commands which do not meet the conditions are inputted to the driver,
the one-touch tuning error may occur.
Servo motor
speed
Forward
rotation
0 r/min
Reverse
rotation
One cycle time
Dwell time
Deceleration
time constant
Travel distance
Acceleration
time constant
Fig. 6.1 Recommended command for one-touch tuning in the user command method
Set 100 pulses or more in encoder unit. Setting less than 100 pulses will cause the one-touch tuning error
"C004".
Set 150 r/min (mm/s) or higher. Setting less than 150 r/min may cause the one-touch tuning error "C005".
Acceleration time
constant
Deceleration time
constant
Set the time to reach 2000 r/min (mm/s) to 5 s or less.
Set an acceleration time constant/deceleration time constant so that the acceleration/deceleration torque is 10%
or more of the rated torque.
The estimation accuracy of the load to motor inertia ratio is more improved as the acceleration/deceleration
torque is larger, and the one-touch tuning result will be closer to the optimum value.
Set 200 ms or more. Setting a smaller value may cause the one-touch tuning error "C004".
Set 30 s or less. Setting over 30 s will cause the one-touch tuning error "C004".

 Loading...
Loading...