6. NORMAL GAIN ADJUSTMENT
6 - 32
(2) 2 gain adjustment mode 2
Use 2 gain adjustment mode 2 when proper gain adjustment cannot be made with 2 gain adjustment
mode 1. Since the load to motor inertia ratio is not estimated in this mode, set the value of a proper load
to motor inertia ratio in [Pr. PB06].
The following parameters are used for 2 gain adjustment mode 2.
(a) Automatically adjusted parameter
The following parameters are automatically adjusted by auto tuning.
Speed integral compensation
(b) Manually adjusted parameter
The following parameters are adjustable manually.
Load to motor inertia ratio
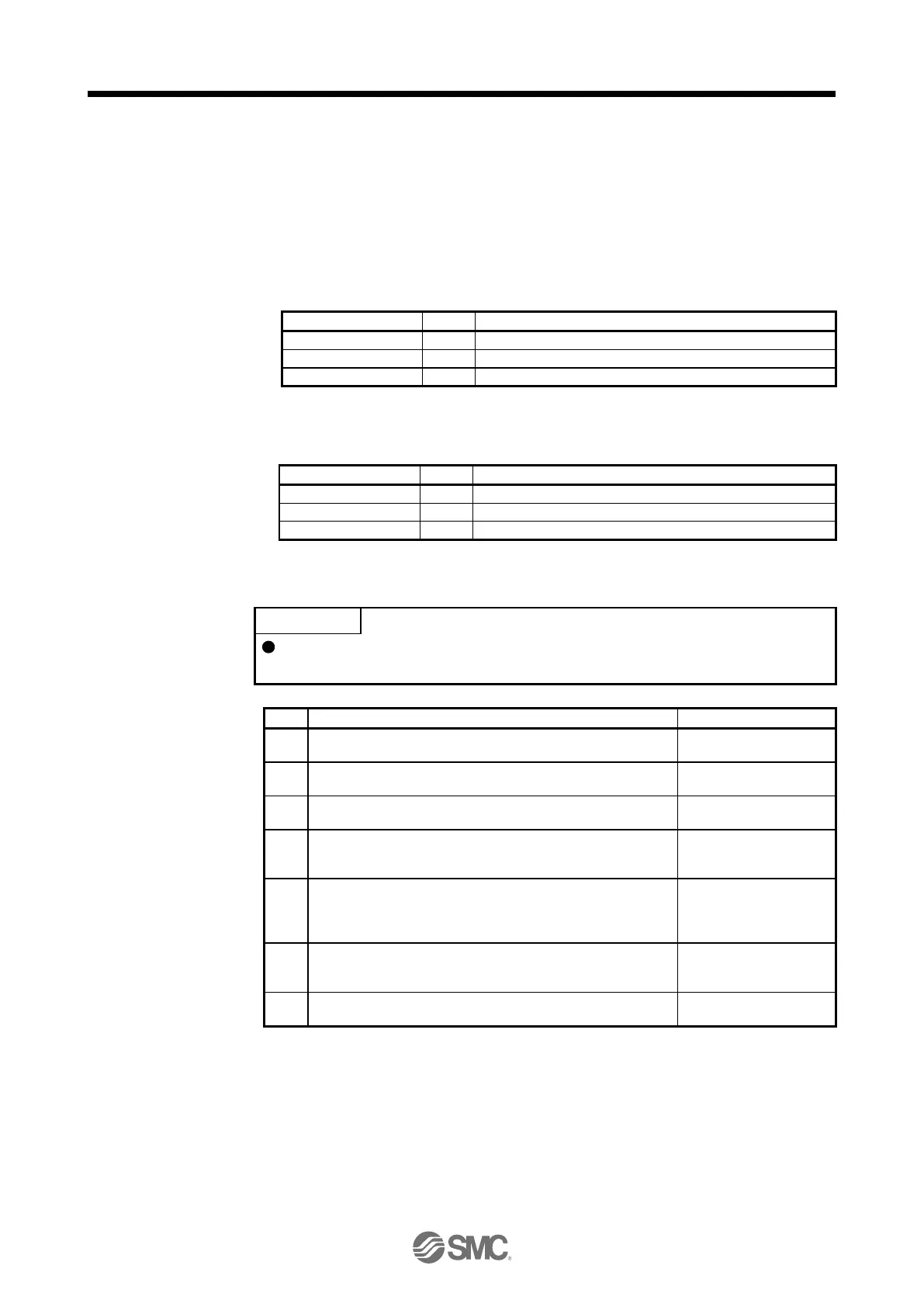
(3) Adjustment procedure of 2 gain adjustment mode
Set the same value in [Pr. PB07 Model loop gain] for the axis used in 2 gain
adjustment mode.
Set to the auto tuning mode.
Select the auto tuning
mode 1.
During operation, increase the response level setting value in
[Pr. PA09], and return the setting if vibration occurs.
Adjustment in auto tuning
mode 1.
Check value of the model loop gain and the load to motor inertia
ratio in advance.
Check the upper setting
limits.
Set the 2 gain adjustment mode 1 ([Pr. PA08]: _ _ _ 0).
Select the 2 gain
adjustment mode 1
(interpolation mode).
When the load to motor inertia ratio is different from the design
value, select the 2 gain adjustment mode 2 ([Pr. PA08]: _ _ _ 4)
and then set the load to motor inertia ratio manually in [Pr.
PB06].
Check the load to motor
inertia ratio.
Set the model loop gain of all the axes to be interpolated to the
same value. At that time, adjust to the setting value of the axis,
which has the smallest model loop gain.
Considering the interpolation characteristic and motor status,
fine-adjust the model loop gain and response level setting.

 Loading...
Loading...