12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 17
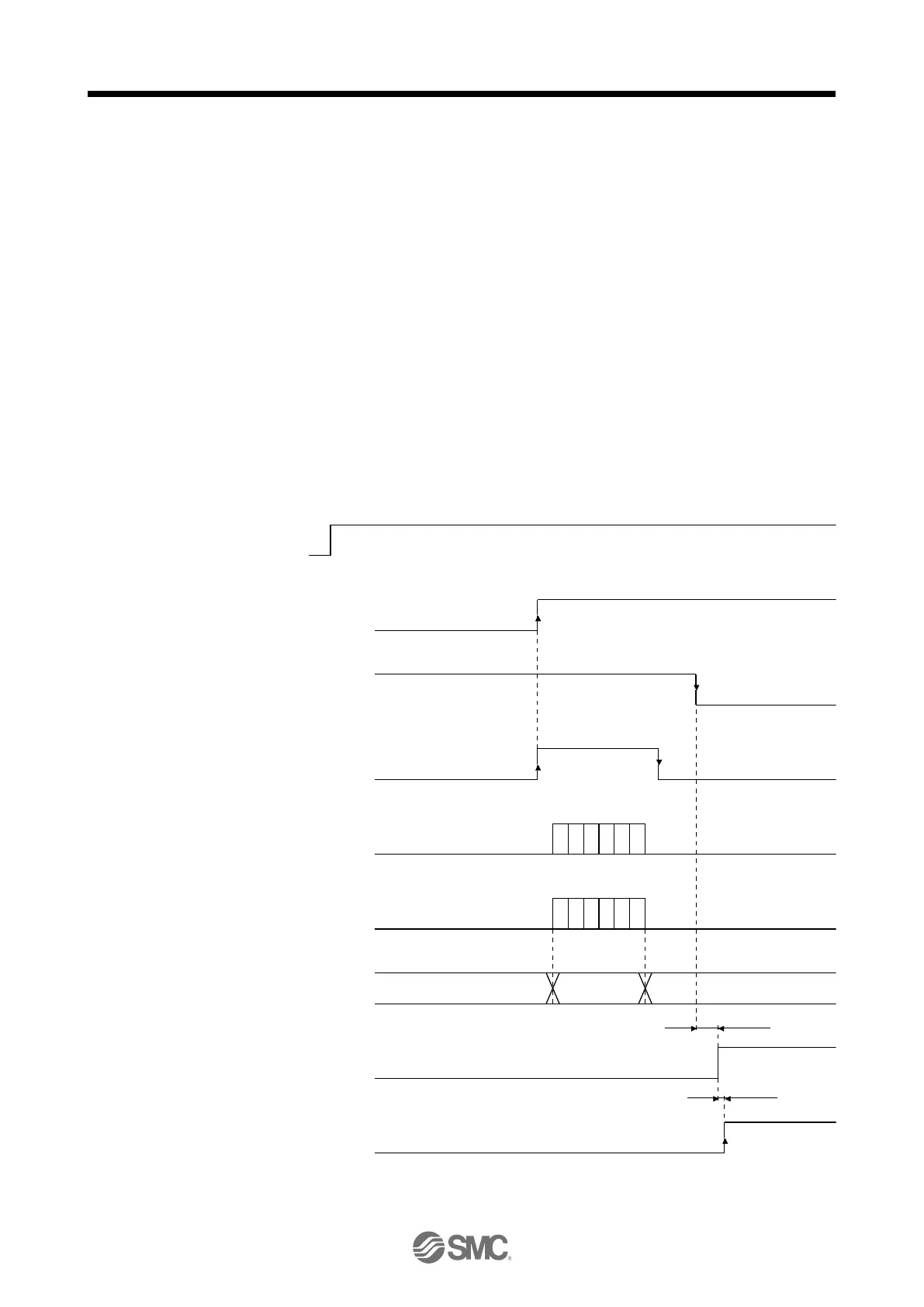
(4) At the time of forced stop reset
(a) If the power is switched on in the forced stop state
he forced stop state can be reset while the absolute position data is being transferred. If the forced
stop state is reset while the absolute position data is transmitted, the base circuit is turned on 95 ms
after resetting. If ABSM is off when the base circuit is turned on, RD is turned on 5 ms after the
turning on of the base circuit. If ABSM is on when the base circuit is turned on, it is turned off and
then RES is turned on. The absolute position data can be transmitted after the forced stop state is
reset.
The current position in the driver is updated even during an forced stop. When SON or ABSM are
turned on during an forced stop as shown below, the driver transmits to the PC or PLC...etc the
current position latched when ABSM switches from off to on, and at the same time, the driver sets
this data as a position command value. However, since the base circuit is off during a forced stop,
the servo-lock status is not encountered. Therefore, if the servo motor is rotated by external force or
the like after ABSM is turned on, this travel distance is accumulated in the driver as droop pulses. If
the forced stop is cleared in this status, the base circuit turns on and the motor returns to the original
position rapidly to compensate for the droop pulses. To avoid this status, reread the absolute position
data before clearing the forced stop.

 Loading...
Loading...