14. COMMUNICATION FUNCTION
14 - 19
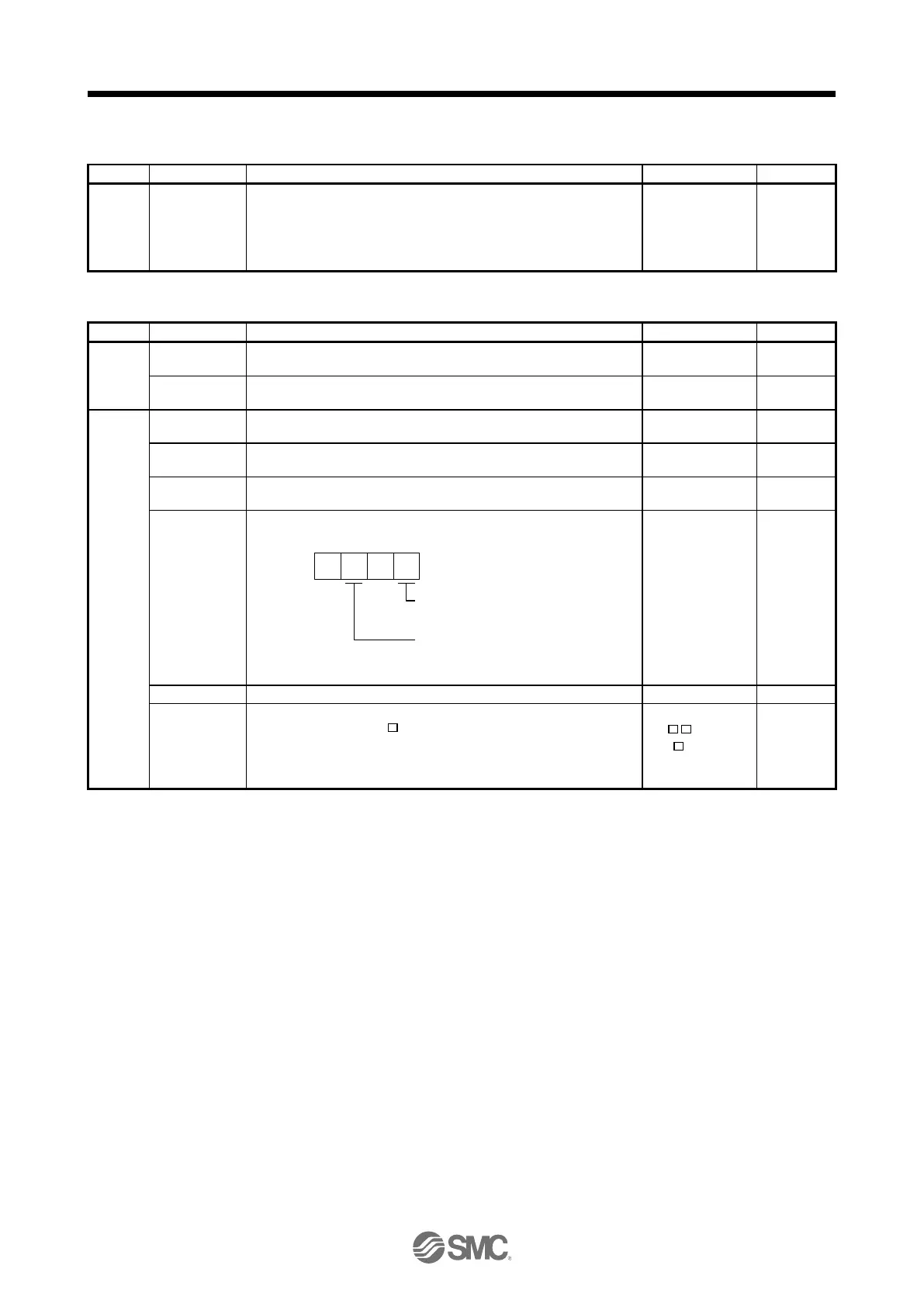
(7) Operation mode selection (command [8] [B])
Selection of test operation mode
0000: Test operation mode cancel
0001: JOG operation
0002: Positioning operation
0004: Output signal (DO) forced output
(8) Test operation mode data (command [9] [2], [A] [0])
Input signal for test operation
Forced output of signal pin
Writes the servo motor speed in the test operation mode (JOG
operation and positioning operation).
Writes the acceleration/deceleration time constant in the test
operation mode (JOG operation and positioning operation).
Sets the travel distance in the test operation mode (Positioning
operation).
Selects the positioning direction of test operation (positioning
operation).
0: Forward rotation direction
1: Reverse rotation direction
0: Command pulse unit
1: Encoder pulse unit
0 0
This is a start command for test operation (positioning operation).
This is used to make a temporary stop during test operation
(positioning operation). " " in the data indicates a blank.
STOP: Temporary stop
GO□□: Restart for remaining distance
CLR□: Remaining distance clear

 Loading...
Loading...