14. COMMUNICATION FUNCTION
14 - 34
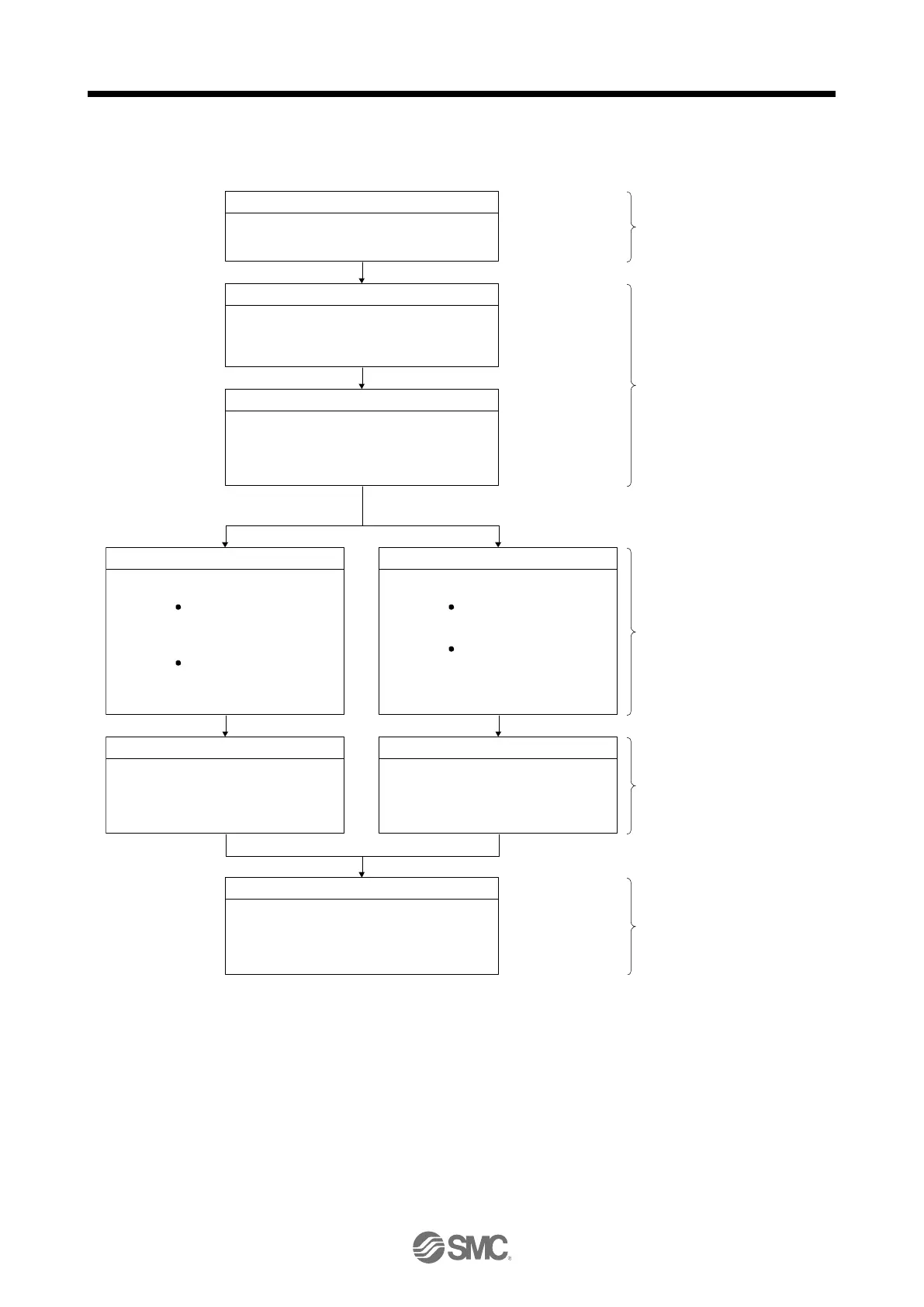
(2) JOG operation
Transmit the command, data No., and data as follows to execute JOG operation.
: [8] [B]
: [0] [0]
: 0001 (JOG operation)
: [A] [0]
: [1] [0]
: Write the servo motor speed [r/min]
in hexadecimal.
: [A] [0]
: [1] [1]
: Write the acceleration/
deceleration time constant [ms] in
hexadecimal.
: [9] [2]
: [0] [0]
: 00000007
(Turn on SON, LSP,
and LSN.)
: [9] [2]
: [0] [0]
00000001
(Turn on SON.)
: [8] [B]
: [0] [0]
0000
(Test operation mode is
canceled.)
: [9] [2]
: [0] [0]
: Forward rotation direction
00000807
(Turn on SON, LSP, LSN,
and ST1.)
Reverse rotation direction
00001007
(Turn on SON, LSP, LSN,
and ST2.)
: [9] [2]
: [0] [0]
: Forward rotation direction
00000801
(Turn on SON and ST1.)
Reverse rotation direction
00001001
(Turn on SON and ST2.)
Command
Data No.
Data
Command
Data No.
Data
Command
Data No.
Data
Command
Data No.
Data
Command
Data No.
Data
Command
Data No.
Data
Command
Data No.
Data
Command
Data No.
Data
Start
Start
Stop
End
Stop
Stop
Test operation mode is canceled.
Start
Start
Select the JOG operation in the test
operation mode.
Set the operation pattern.
Servo motor speed setting
Acceleration/deceleration time constant setting
When LSP/LSN was turned Off by external
input signal
When LSP/LSN was turned On by external
input signal or automatically

 Loading...
Loading...