When an alarm occurs, ALM will turn off.
When an alarm does not occur, ALM will turn on after 4 s to 5 s after
power-on.
When [Pr. PD34] is "_ _ 1 _", an alarming or warning will turn off ALM.
When an alarm occurs, ALMWNG will turn off.
When a warning (except [AL. 9F Battery warning]) occurs on and off will be
repeated every 1 s.
When an alarm/warning is not occurring, turning on the power will turn on
ALMWNG after 4 s to 5 s.
When warning has occurred, WNG turns on. When a warning is not
occurring, turning on the power will turn off WNG after 4 s to 5 s.
BWNG turns on when [AL. 92 Battery cable disconnection warning] or [AL.
9F Battery warning] has occurred. When the battery warning is not
occurring, turning on the power will turn off BWNG after 4 s to 5 s.
When [AL. 9F Battery warning] occurs, BW9F will turn on.
it is not necessary to use this device.
Enabling servo-on to make the driver ready to operate will turn on RD.
When the number of droop pulses is in the preset in-position range, INP
will turn on. The in-position range can be changed using [Pr. PA10]. When
the in-position range is increased, INP may be on during low-speed
rotation.
INP turns on when servo-on turns on.
TLC turns on when a generated torque reaches a value set with any of [Pr.
PA11 Forward torque limit], [Pr. PA12 Reverse torque limit], or TLA
(Analog torque limit).
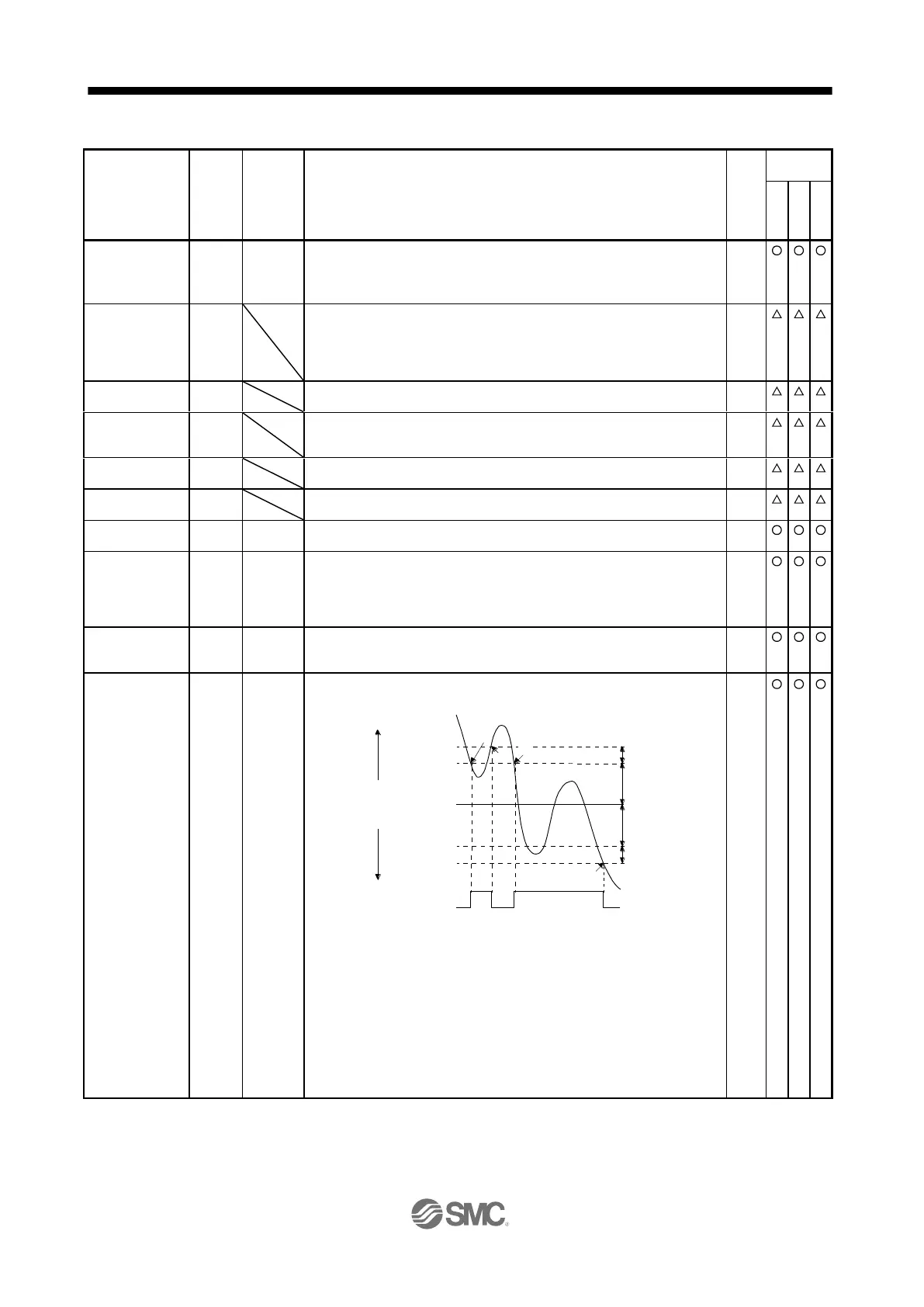
ZSP turns on when the servo motor speed is zero speed (50 r/min) or less.
Zero speed can be changed with [Pr. PC17].
ZSP will turn on when the servo motor is decelerated to 50 r/min (at 1)),
and will turn off when the servo motor is accelerated to 70 r/min again (at
2)).
ZSP will turn on when the servo motor is decelerated again to 50 r/min (at
3)), and will turn off when the servo motor speed has reached -70 r/min (at
4)).
The range from the point when the servo motor speed has reached on
level, and ZSP turns on, to the point when it is accelerated again and has
reached off level is called hysteresis width.
Hysteresis width is 20 r/min for this driver.
OFF
ON
Servo motor
speed
20 r/min
(Hysteresis width)
[Pr. PC17]
20 r/min
(Hysteresis width)
OFF level
-70 r/min
ON level
-50 r/min
ON level
50 r/min
OFF level
70 r/min
0 r/min
[Pr. PC17]
ZSP
(Zero speed
detection)
1)
3)
2)
4)
Forward
rotation
direction
Reverse
rotation
direction

 Loading...
Loading...