(f) Suspension of automatic operation
To suspend the automatic operation or change the operation pattern, stop the servo motor with
TSTP (Temporary stop/restart), switch off MD0 (Operation mode selection 1), and then set the mode
to the manual mode. The remaining travel distance is cleared.
(g) Handling of control unit "degree"
1) Current position/command position address
The current position/command position address is of ring-address type.
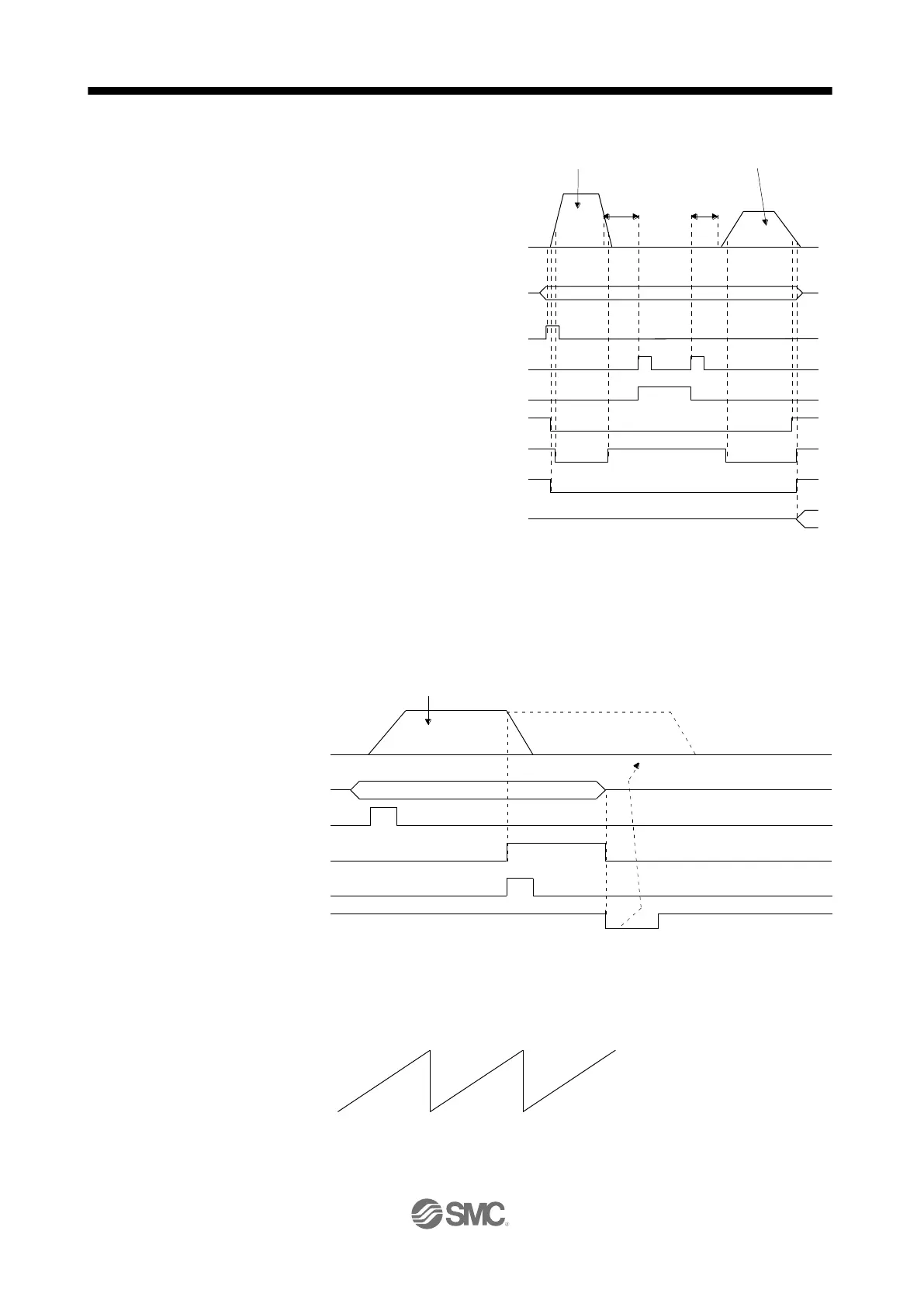
ON
OFF
ON
OFF
ON
OFF
OFF
OFF
ON
ON
OFF
ON
ST1 (Forward rotation start)
or ST2 (Reverse rotation start)
Point table No. n + 1Point table No. n
Dwell = ta + tb
ta tb
No. n
No. n
PT0 (Point table No. output 1)
to PT7 (Point table No. output 8)
(Note)
MEND (Travel completion)
INP (In-position)
CPO (Rough match)
PUS (Temporary stop)
TSTP (Temporary stop/restart)
Point table
Forward rotation
0 r/min
Reverse rotation
Servo motor speed

 Loading...
Loading...