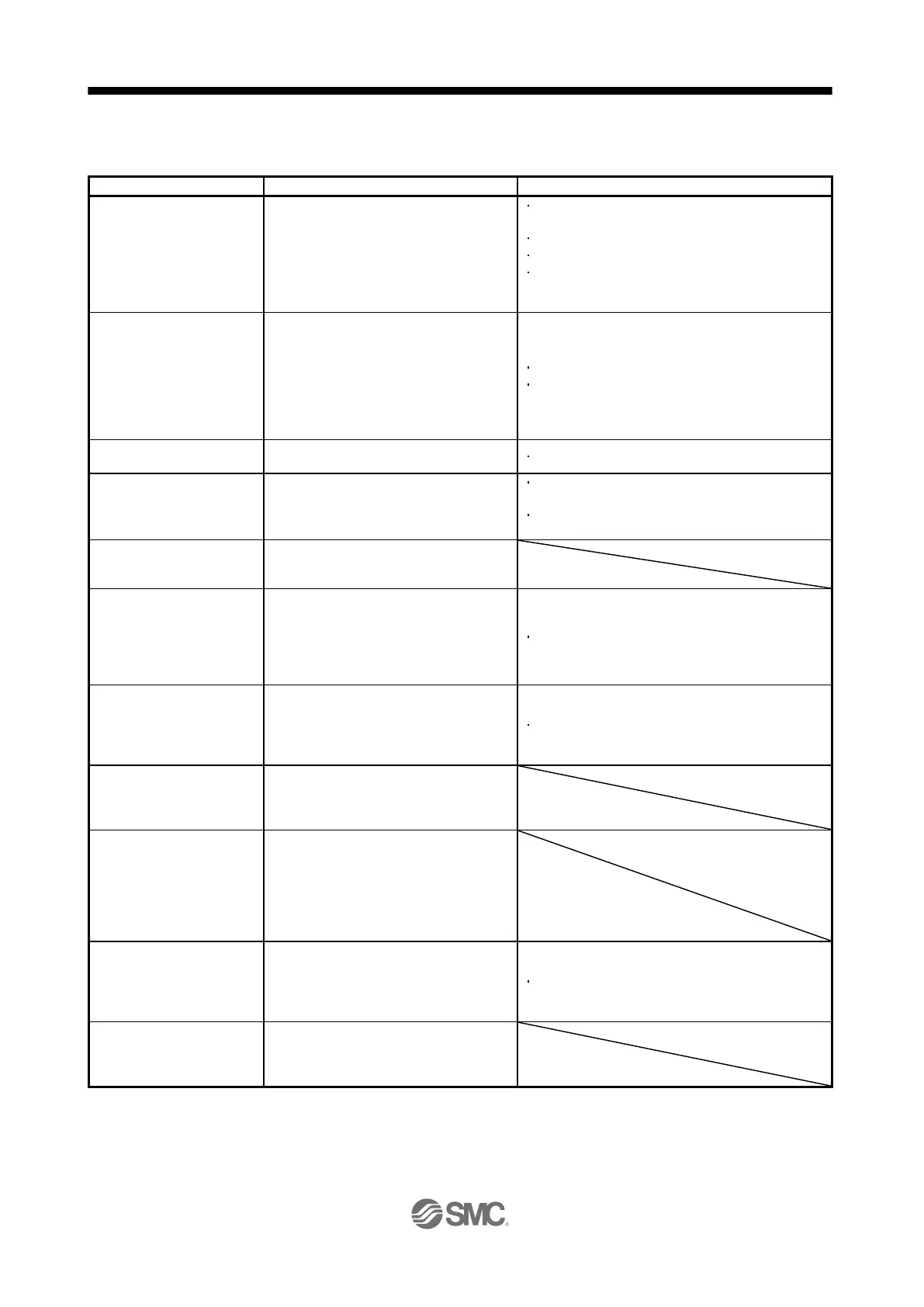
(1) Home position return types
Select the optimum home position return type according to the machine type or others.
Home position return method
Deceleration starts at the proximity dog
front end. After the rear end is passed, the
position specified by the first Z-phase
signal, or the position of the first Z-phase
signal shifted by the home position shift
distance is used as the home position.
General home position return method using a
proximity dog
The repeatability of the home position return is high.
The machine is less loaded.
Used when the width of the proximity dog can be set
equal to or greater than the deceleration distance of
the servo motor.
Deceleration starts at the proximity dog
front end. After the proximity dog is passed,
the motor travels the specified travel
distance. Then, the position specified by the
first Z-phase signal, or the position of the
first Z-phase signal shifted by the home
position shift distance is used as the home
position.
Home position return method using a proximity dog
Used to minimize the length of the proximity dog.
An arbitrary position is used as the
home position.
No proximity dog is required.
A workpiece is pressed against a
mechanical stopper, and the position where
it is stopped is set as the home position.
The home position return speed must be low enough
because of the collision with the mechanical stopper.
The strength of the machine and its stopper must be
increased.
Home position ignorance
(servo-on position as home
position)
The position where the servo is switched on
is used as the home position.
Dog type rear end reference
Deceleration starts at the proximity dog
front end. After the rear end is passed, the
position is shifted by the travel distance
after proximity dog and the home position
shift distance. The position after the shifts is
set as the home position.
The Z-phase signal is not required.
Count type front end
reference
Deceleration starts at the proximity dog
front end. The position is shifted by the
travel distance after proximity dog and the
home position shift distance. The position
after the shifts is set as the home position.
The Z-phase signal is not required.
After the proximity dog front end is
detected, the position specified by the first
Z-phase signal is used as the home
position.
Dog type last Z-phase
reference
After the proximity dog front end is
detected, the position is shifted away from
the proximity dog in the reverse direction.
Then, the position specified by the first Z-
phase signal, or the position of the first Z-
phase signal shifted by the home position
shift distance is used as the home position.
Dog type front end reference
From the proximity dog front end, the
position is shifted by the travel distance
after proximity dog and the home position
shift distance. The position after the shifts is
set as the home position.
The Z-phase signal is not required.
Dogless Z-phase reference
The position specified by the first Z-phase
signal, or the position of the first Z-phase
signal shifted by the home position shift
distance is used as the home position.

 Loading...
Loading...