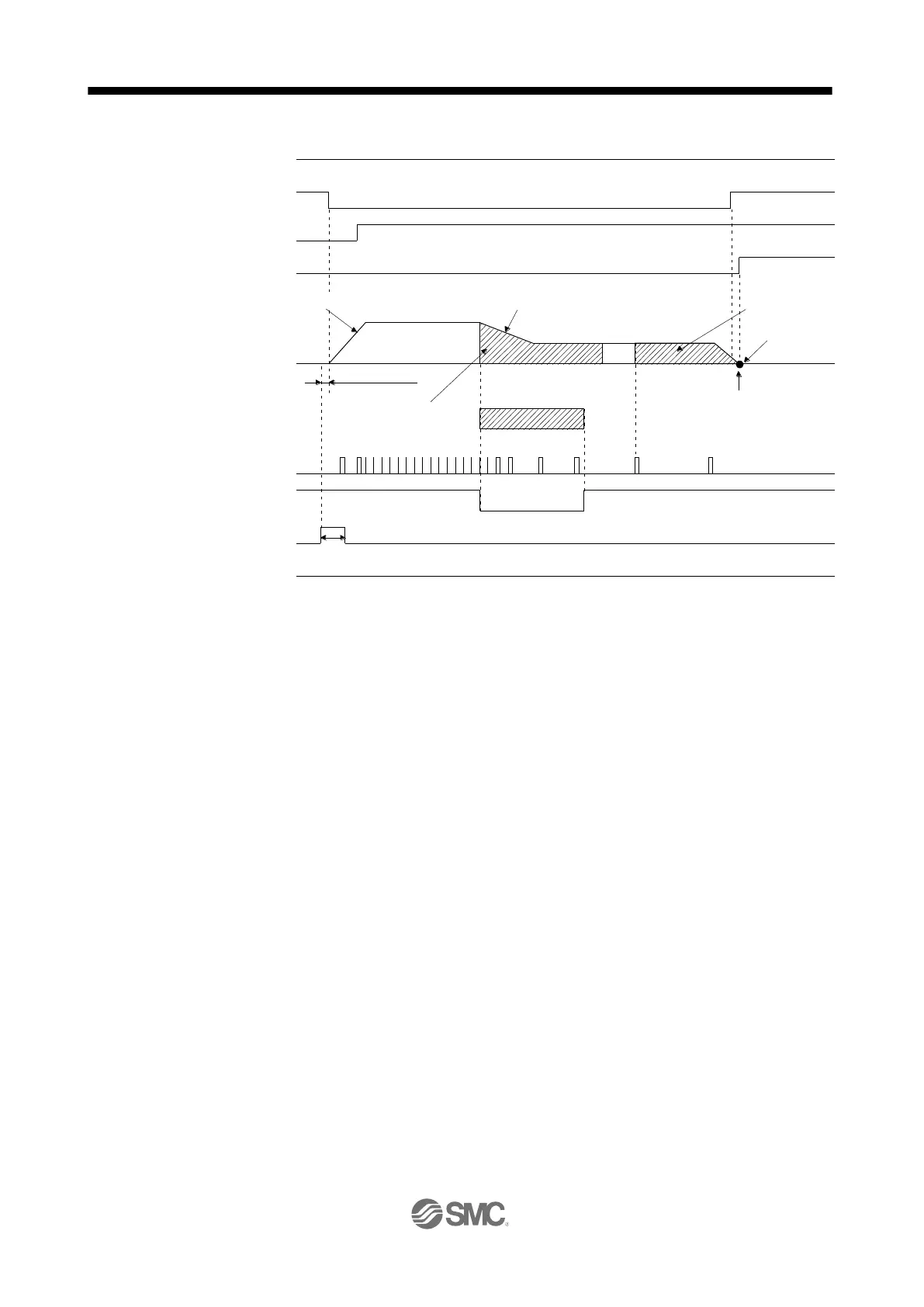
(2) Timing chart
The setting value of [Pr. PT08 Home position return position data] is used as the position address at the
home position return completion.
ON
OFF
MEND (Travel completion)
ON
OFF
CPO (Rough match)
ON
OFF
Servo motor speed
MD0 (Operation mode selection 1)
Forward rotation
0 r/min
Reverse rotation
ON
OFF
ON
OFF
Z-phase
DOG (Proximity dog)
ZP
(Home position return completion)
ON
OFF
ON
OFF
ON
OFF
ST1 (Forward rotation start)
ST2 (Reverse rotation start)
3 ms or shorter
Home position return speed
Deceleration time constant
Creep speed
Home position
shift distance
Home position
Home position return position data
Proximity dog
5 ms or longer
Acceleration time constant
Travel distance after
proximity dog

 Loading...
Loading...