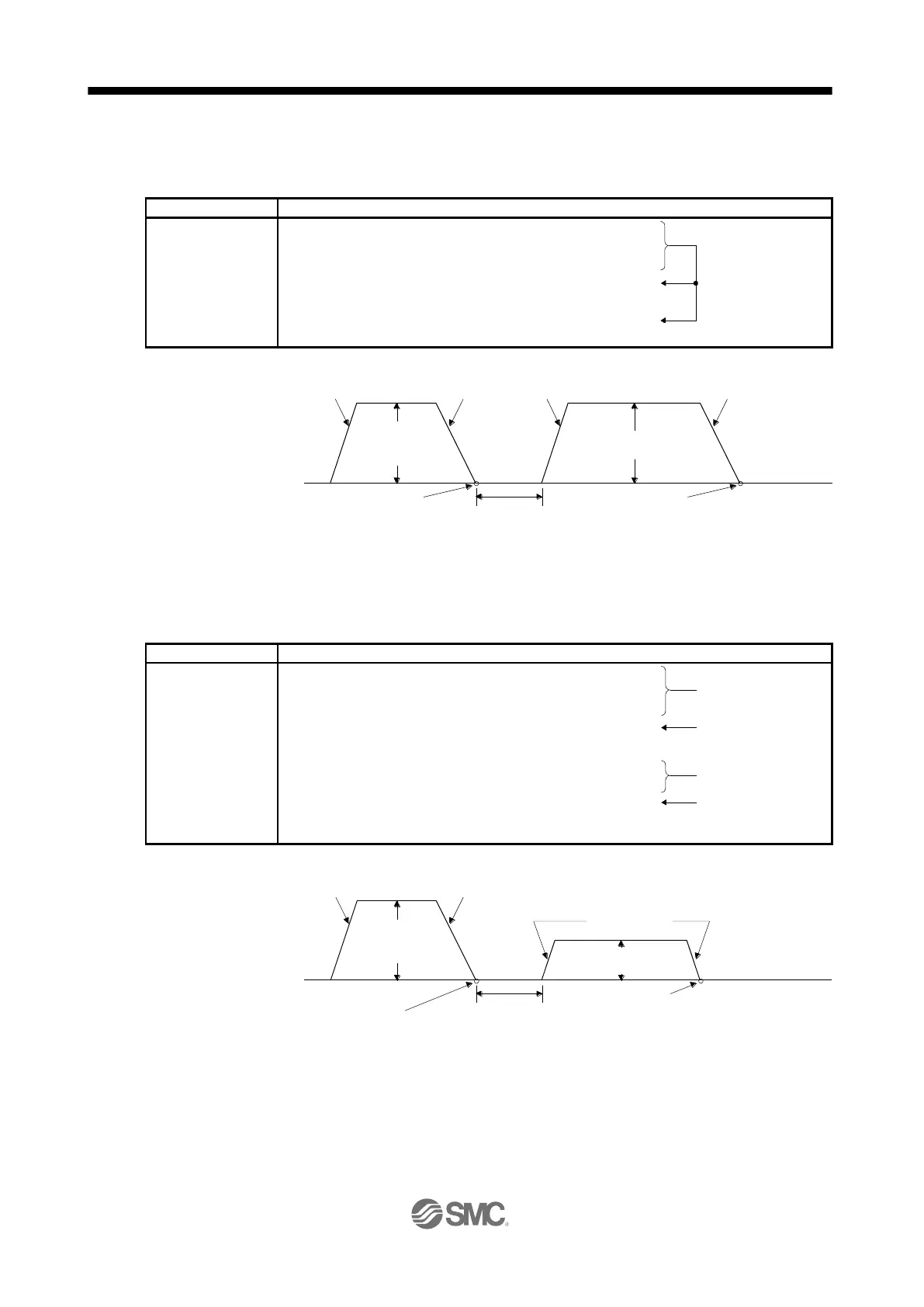
1) Program example 1
When executing two operations where the servo motor speeds, acceleration time constants, and
deceleration time constants are the same and the travel commands are different
Acceleration time constant
Deceleration time constant
Absolute value travel command
Absolute value travel command
2) Program example 2
When executing two operations where the servo motor speeds, acceleration time constants,
deceleration time constants, and travel commands are different
Acceleration time constant
Deceleration time constant
Absolute value travel command
Acceleration/deceleration time
constant
Absolute value travel command
b) Acceleration time
constant (200 ms)
c) Deceleration time
constant (300 ms)
a) Servo motor
speed
(1000 r/min)
Forward rotation
0 r/min
Reverse rotation
Servo motor
speed
d) Absolute value
travel command
(1000 × 10
STM
μ
m)
e) Dwell (100 ms)
b) Acceleration time
constant (200 ms)
a) Servo motor speed
(1000 r/min)
c) Deceleration time
constant (300 ms)
f) Absolute value
travel command
(2000 × 10
STM
μ
m)
b) Acceleration time
constant (200 ms)
a) Servo motor
speed
(1000 r/min)
Servo motor
speed
Forward rotation
0 r/min
Reverse rotation
c) Deceleration time
constant (300 ms)
e) Dwell
(100 ms)
d) Absolute value travel command
(1000 × 10
STM
μ
m)
g) Acceleration/
deceleration
time constant
(200 ms)
f) Servo motor speed
(500 r/min)
h) Absolute value travel command
(1500 × 10
STM
μ
m)
 Loading...
Loading...