(l) Torque limit value switching (TLP/TLN/TQL)
Using the maximum torque as 100.0%, limit the generated torque of the servo motor.
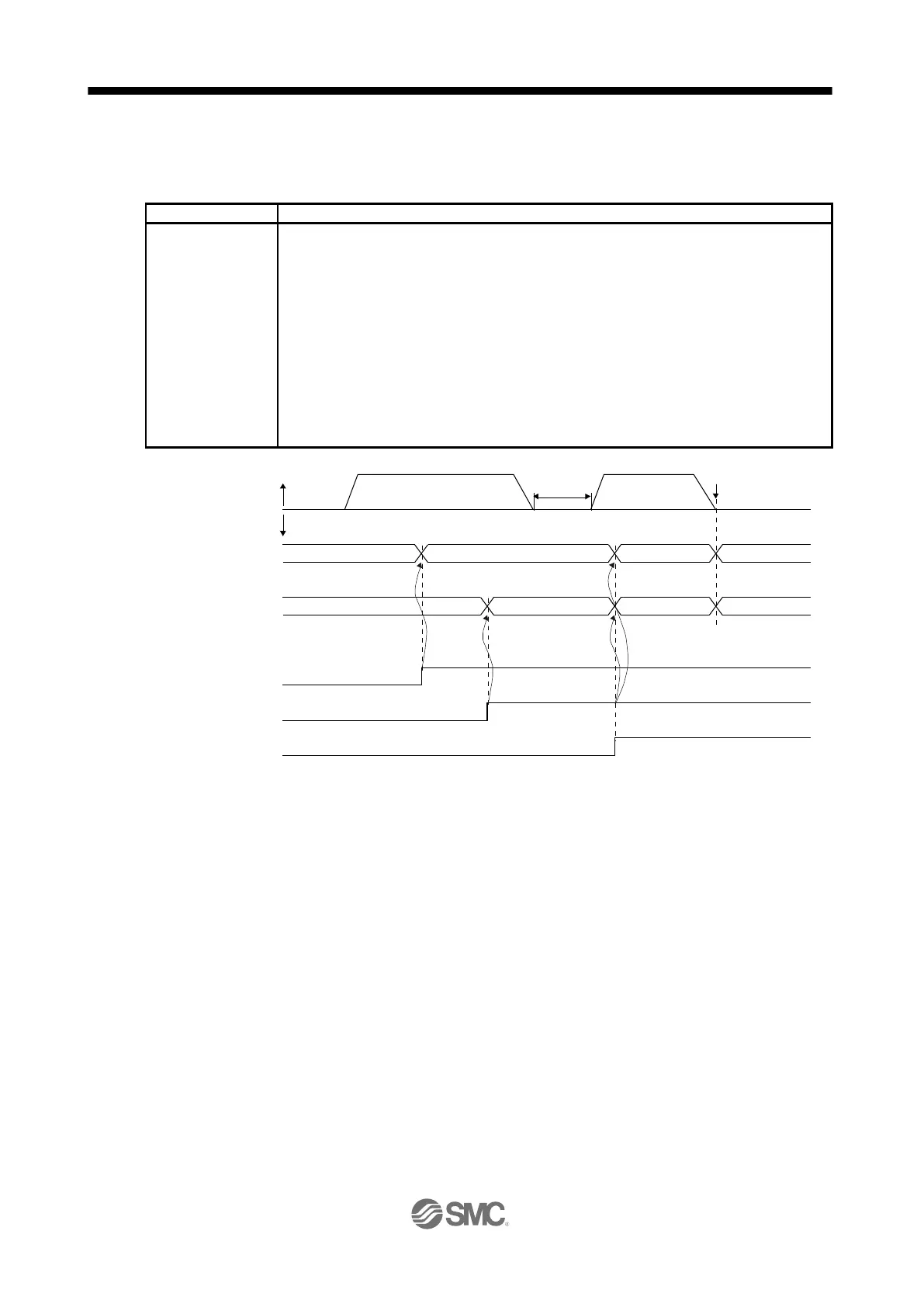
1) Program example
SPN (1500)
STA (100)
STB (200)
MOV (1000)
Servo motor speed
Acceleration time constant
Deceleration time constant
Absolute value travel command
1500 [r/min]
100 [ms]
200 [ms]
1000 [×10
STM
μm]
Suspend the step until PI1 (Program input 1) is switched on.
Forward rotation torque limit
Suspend the step until PI2 (Program input 2) is switched on.
TLN (500)
TIM (100)
MOV (500)
Reverse rotation torque limit
Dwell
Absolute value travel command
500 [0.1%]
100 [ms]
1000 [×10
STM
μm]
Suspend the step until PI3 (Program input 3) is switched on.
Torque limit
Program stop
[Pr. PA11] setting [Pr. PA11] setting
h) Program stop
g) Torque limit
g) Torque limit
Torque limit value
returns to parameter
setting value by
program stop.
d) Reverse rotation
torque limit
b) Forward rotation torque limit
Forward rotation torque limit
Reverse rotation torque limit
PI1 (Program input 1)
PI2 (Program input 2)
PI3 (Program input 3)
Servo motor speed
a) PI1-on
f) PI3-on
c) PI2-on
80.0% 30.0%
e) 100 ms
[Pr. PA12] setting
Forward
rotation
0 r/min
Reverse
rotation
ON
OFF
ON
OFF
ON
OFF
[Pr. PA12] setting50.0% 30.0%

 Loading...
Loading...