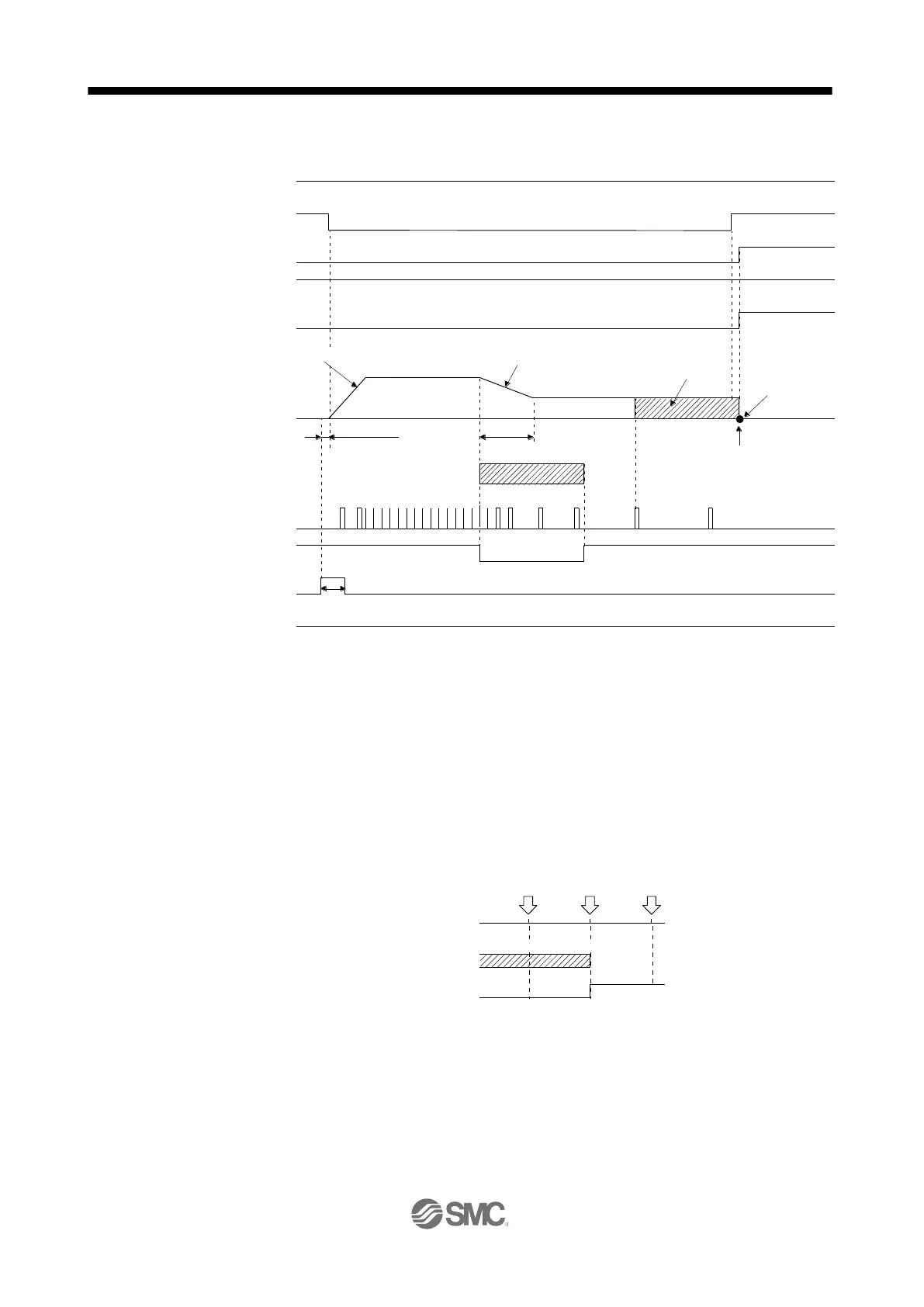
(3) Timing chart
The following shows a timing chart after a program containing a "ZRT" command is selected.
The setting value of [Pr. PT08 Home position return position data] is used as the position address at the
home position return completion.
(4) Adjustment
For the dog type home position return, adjust the setting so that the Z-phase signal is always generated
during the detection of a dog. Make an adjustment so that the rear end of DOG (Proximity dog) is
positioned almost at the center between the position specified by a Z-phase signal and the position
specified by the next Z-phase signal.
The generation position of the Z-phase signal can be checked with "Position within one-revolution" of
"Status Display" on Setup software (MR Configurator2
TM
).
ON
OFF
MEND (Travel completion)
ON
OFF
ON
OFF
CPO (Rough match)
ON
OFF
Servo motor speed
MD0 (Operation mode selection 1)
Forward rotation
0 r/min
Reverse rotation
ON
OFF
ON
OFF
Z-phase
DOG (Proximity dog)
ZP
(Home position return completion)
ON
OFF
ON
OFF
ON
OFF
ST1 (Forward rotation start)
ST2 (Reverse rotation start)
3 ms or shorter
Home position return speed
Deceleration time constant
Creep speed
Home position shift distance
Home position
Home position return position data
td
Proximity dog
5 ms or longer
Acceleration time constant
PED (Position end)

 Loading...
Loading...