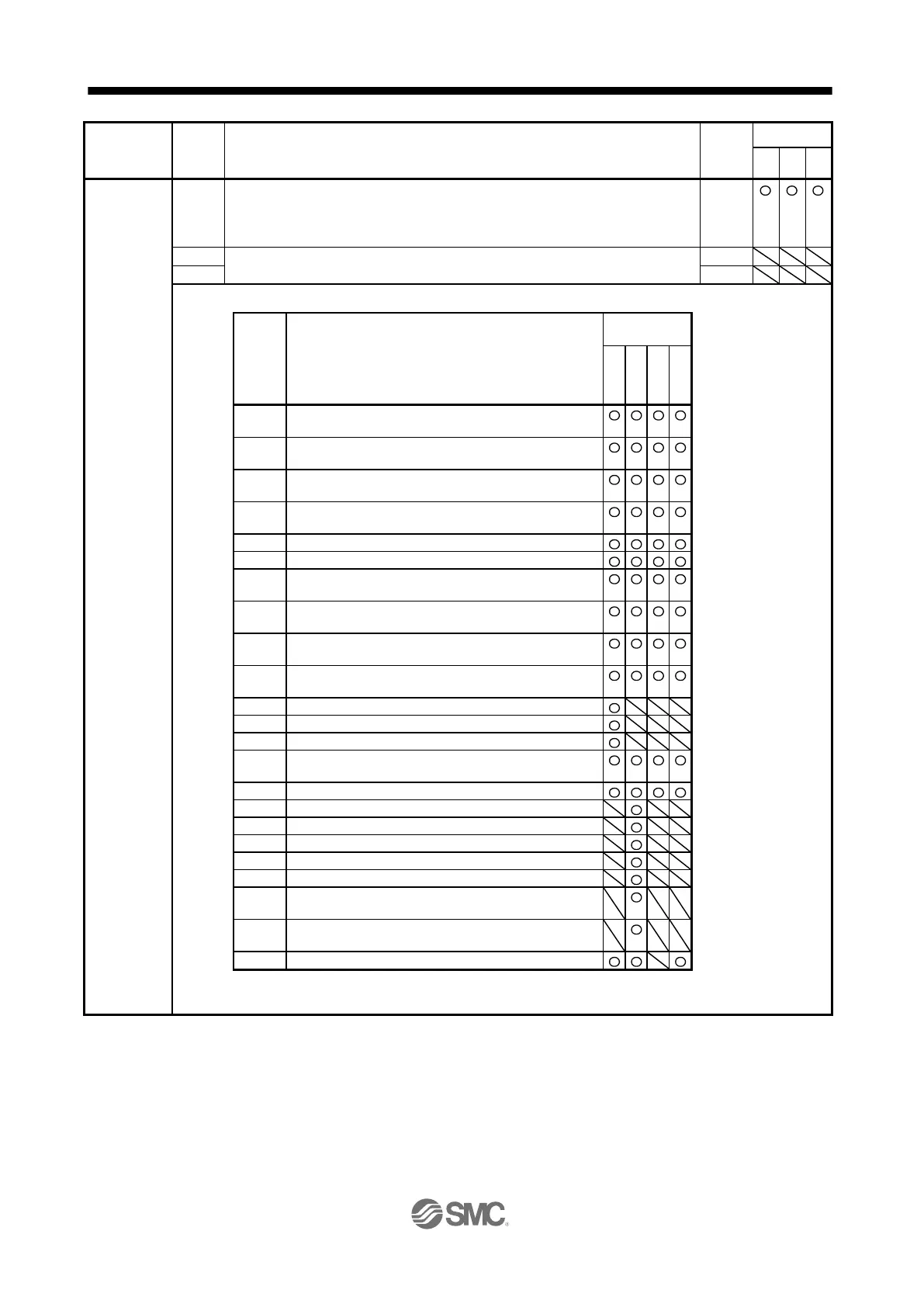
PC14
MOD1
Analog
monitor 1
output
Analog monitor 1 output selection
Select a signal to output to MO1 (Analog monitor 1). Refer to app. 8.3 for detection
points of output selection.
Refer to table 7.8 or 7.9 for settings.
Table 7.8 Analog monitor setting value
Servo motor speed
(±8 V/max. speed)
Torque
(±8 V/max. torque or max. thrust) (Note 3)
Servo motor speed
(+8 V/max. speed)
Torque
(+8 V/max. torque or max. thrust) (Note 3)
Current command (±8 V/max. current command)
Command pulse frequency (±10 V/±4 Mpulses/s)
Servo motor-side droop pulses (±10 V/100 pulses)
(Note 2)
Servo motor-side droop pulses (±10 V/1000 pulses)
(Note 2)
Servo motor-side droop pulses (±10 V/10000 pulses)
(Note 2)
Servo motor-side droop pulses (±10 V/100000 pulses)
(Note 2)
Feedback position (±10 V/1 Mpulses) (Note 2)
Feedback position (±10 V/10 Mpulses) (Note 2)
Feedback position (±10 V/100 Mpulses) (Note 2)
Bus voltage (200 V class and 100 V class: +8 V/400 V,
400 V class: +8 V/800 V)
Speed command 2 (±8 V/max. speed)
Load-side droop pulses (±10 V/100 pulses) (Note 2)
Load-side droop pulses (±10 V/1000 pulses) (Note 2)
Load-side droop pulses (±10 V/10000 pulses) (Note 2)
Load-side droop pulses (±10 V/100000 pulses) (Note 2)
Load-side droop pulses (±10 V/1 Mpulses) (Note 2)
Servo motor-side/load-side position deviation
(±10 V/100000 pulses)
Servo motor-side/load-side speed deviation
(±8 V/max. speed)
Internal temperature of encoder (±10 V/±128 ˚C)
The value in [Pr. PA11] or [Pr. PA12] whichever is higher is applied for the maximum torque.

 Loading...
Loading...