(4) Latch data range setting
The current position is latched only within the range set in [Pr. PC66] to [Pr. PC69].
When a same value is set for the upper and lower limits, the current value will be latched for a whole
range.
(a) mm, inch, and pulse unit
The current position latch function is enabled when Upper limit value > Lower limit value. The valid
range is the same for the absolute value command method ([Pr. PT01]: _ _ _ 0) and the incremental
value command method ([Pr. PT01]: _ _ _ 1).
[AL. 37 occurs] when Upper limit value < Lower limit value.
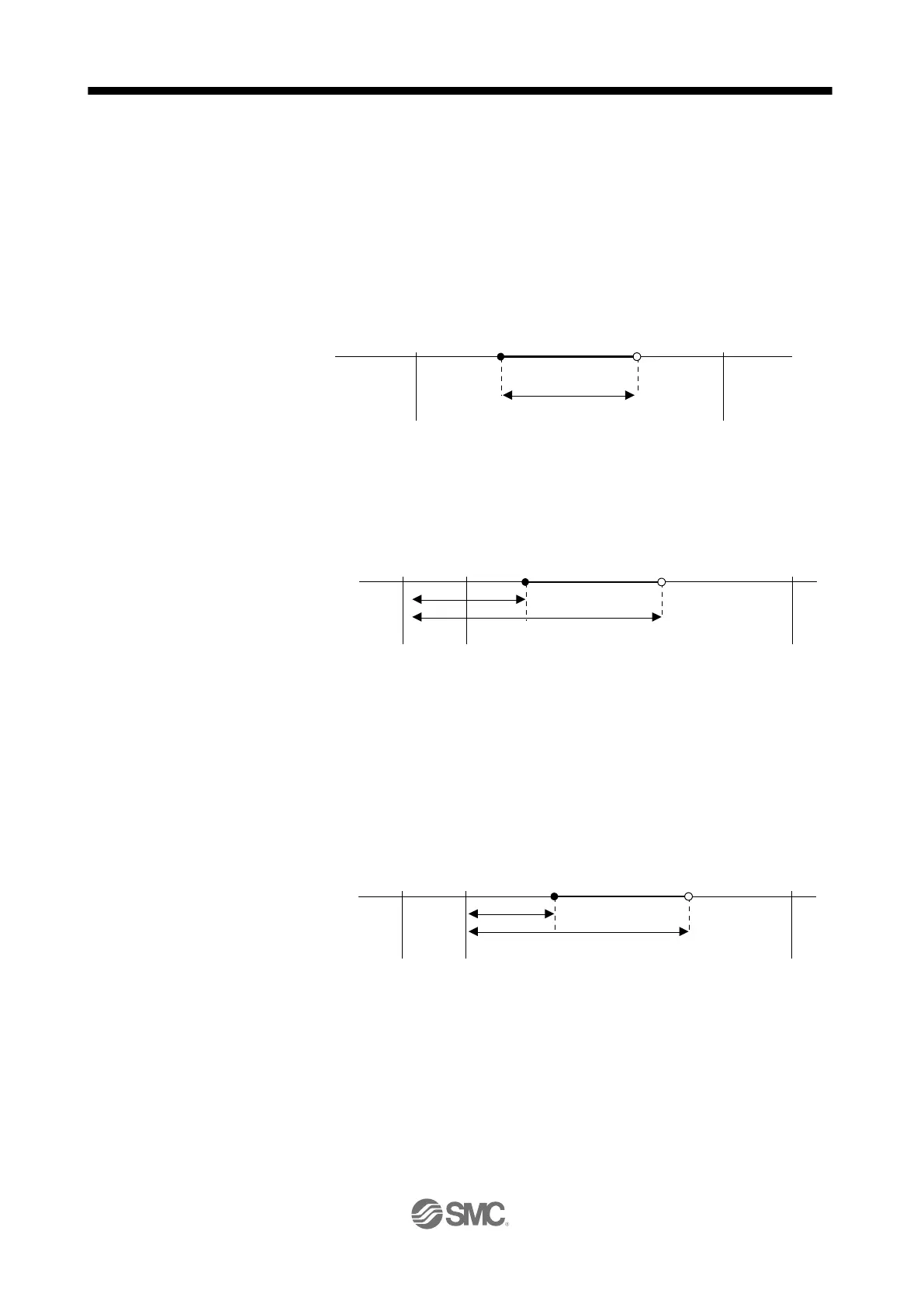
1) When the roll feed display is disabled ([Pr. PT26]: _ _ 0 _)
Set the valid range with the distance from the home position.
When the starting position is at 100000, [Pr. PC66] and [Pr. PC67] are set to 500000, and [Pr.
PC68] and [Pr. PC69] are set to 300000, the valid range is between the actual current position of
300000 and 500000 as set in the parameters.
2) When the roll feed display is enabled ([Pr. PT26]: _ _ 1 _)
When the roll feed display is enabled, the valid range is calculated as the starting position is "0".
Set the valid range with the travel distance from the starting position.
When the starting position is at 100000, [Pr. PC66] and [Pr. PC67] are set to 500000, and [Pr.
PC68] and [Pr. PC69] are set to 300000, the valid range is between the feed current position of
300000 and 500000 from the start position (between the actual current position of 400000 and
600000).

 Loading...
Loading...