If LSP / LSN is turned off during forced stop deceleration, the motor stops as shown below according
to the [Pr.PD30] setting.
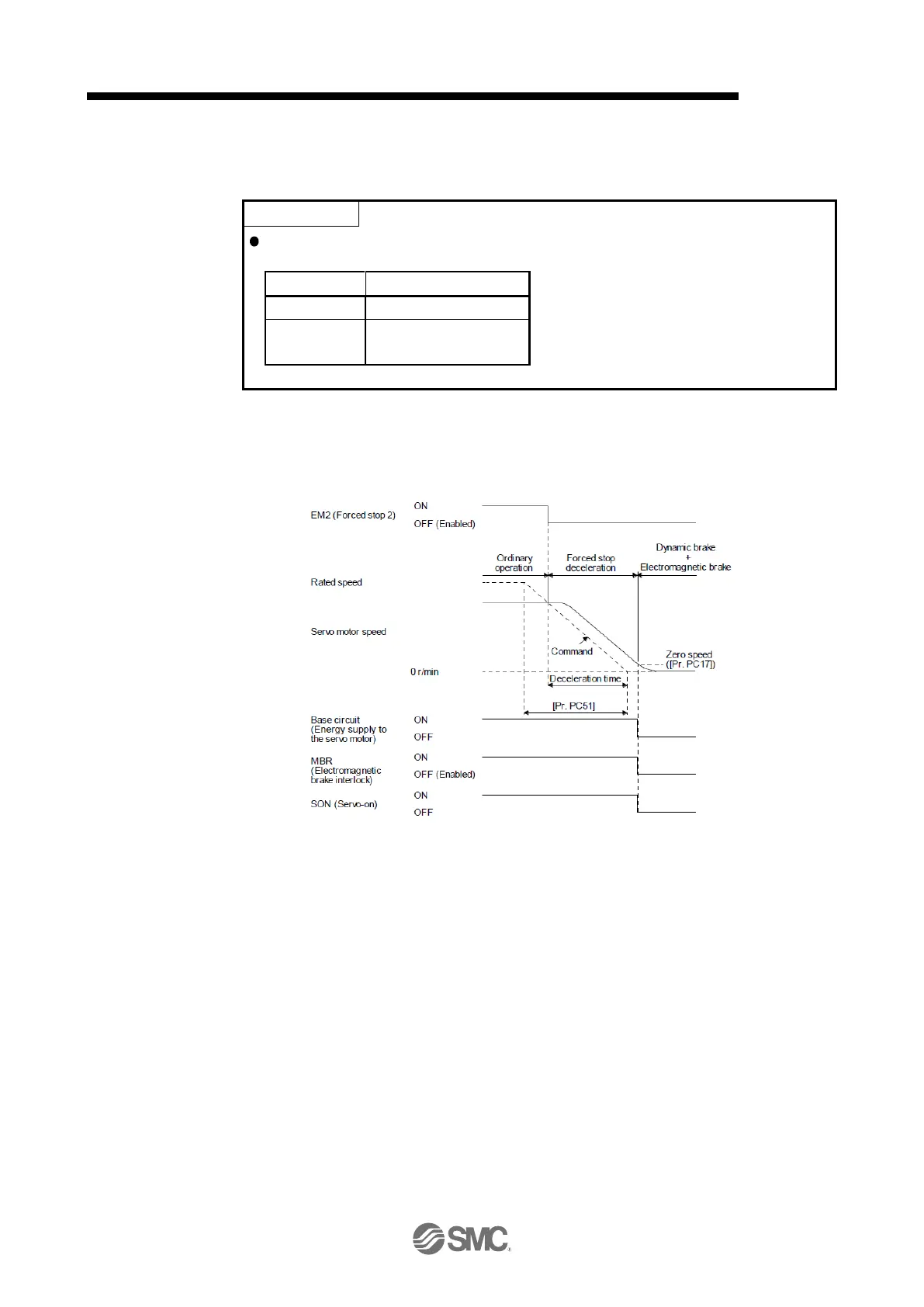
When EM2 (Forced stop 2) is turned off, the motor decelerates according to the value of [Pr. PC51
Deceleration time constant at forced stop].
When the deceleration command is completed and the speed of the servo motor falls below
[Pr. PC17 zero speed], the base is shut off and the dynamic brake operates.
This function can be used in the position control mode and speed control mode.
During the torque control mode and positioning mode during point table type pushing operation, the
dynamic brake is activated and the servo motor stops at the same time as EM2 turns off.
 Loading...
Loading...