8. TROUBLESHOOTING
8 - 73
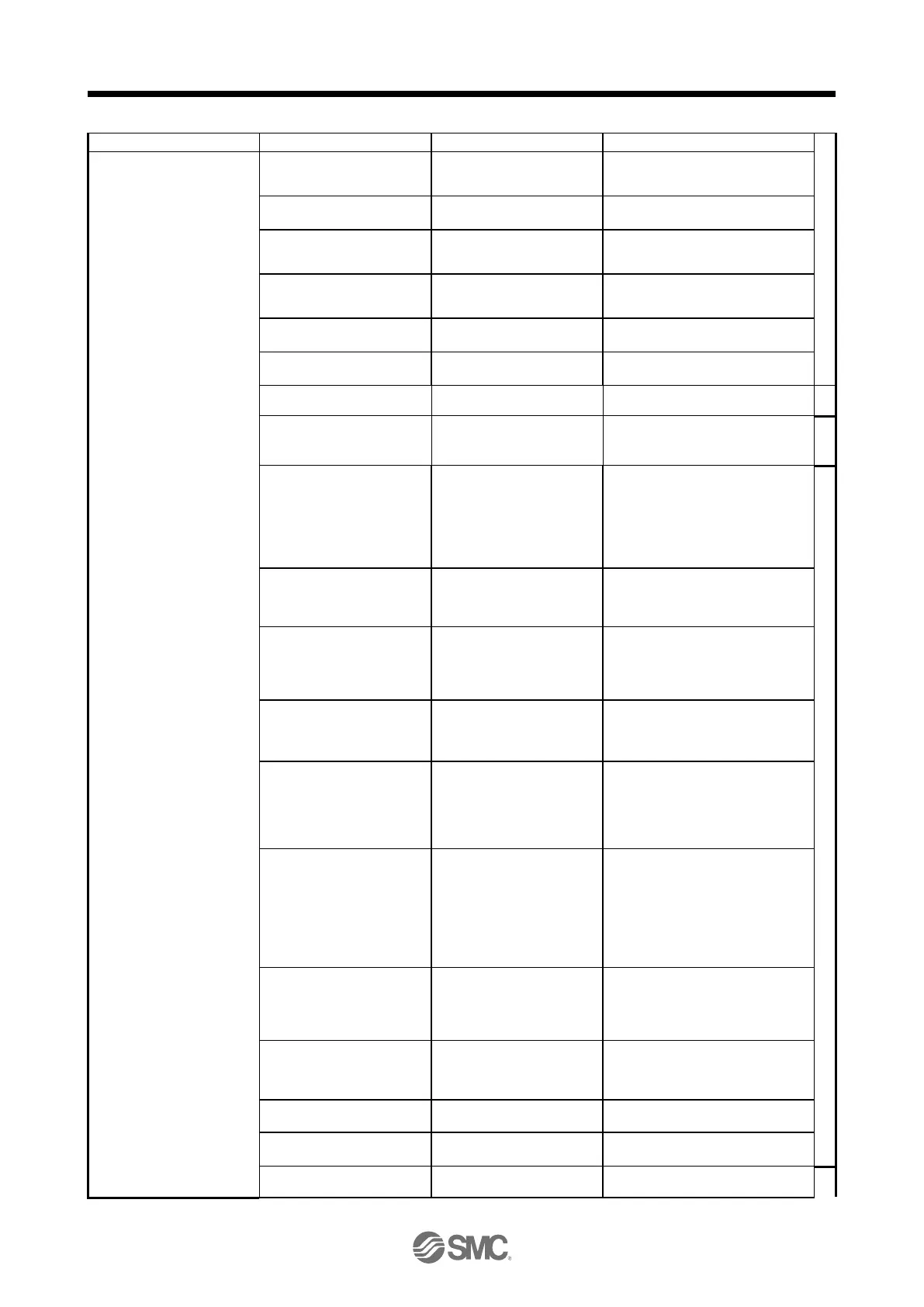
The setting of the torque limit
is incorrect.
Check if the torque limit is "0".
[Pr. PA11] and [Pr. PA12], or
analog input
Machine is interfering with the
motor.
Check if machine is
interfering.
For a servo motor with an
electromagnetic brake, the
lock has not released.
Check the power supply of the
electromagnetic brake.
Turn on the electromagnetic brake
power.
LSP (Forward rotation stroke
end) and LSN (Reverse
rotation stroke end) are not on.
Check if [AL. 99] is
occurring.
SON (Servo-on) is not on.
Check the SON (Servo-on)
state.
Check the RES (Reset)
state.
The setting of the control
mode is incorrect.
Check the [Pr. PA01] setting.
The command pulse is not
inputted in the position control
mode.
Check if the pulse train is
outputted on the controller
side.
Review the setting on the
controller side.
The wiring of the command
pulse train signal is incorrect
in the position control mode.
Check the cumulative
command pulses using the
status display or setup
software (MR
Configurator2
TM
). Input the
pulse train command and
check if the display changes.
Review the wiring. When the
signal is used in open-collector
type, input 24 V DC to OPC.
The setting of the command
pulse input form is incorrect in
the position control mode.
Check that the pulse train form
outputted with the controller
and the setting of [Pr. PA13]
are matched.
Review the [Pr. PA13] setting.
Both of ST1 (Forward rotation
start) and ST2 (Reverse
rotation start) are on or off in
the speed control mode or the
positioning mode.
Check the status of ST1
(Forward rotation start) and
ST2 (Reverse rotation start).
Turn on ST1 (Forward rotation
start) or ST2 (Reverse rotation
start).
Both of RS1 (Forward rotation
selection) and RS2 (Reverse
rotation selection) are on or off
in the torque control mode.
Check the status of RS1
(Forward
rotation selection) and RS2
(Reverse rotation selection).
Turn on RS1 (Forward rotation
selection) or RS2 (Reverse
rotation selection).
The value selected in the
speed control mode or the
torque control mode is low.
Check SP1 (Speed selection
1),
SP2 (Speed selection 2), and
SP3 (Speed selection 3), and
then check if the selected
internal speed is correct.
Review the selections of SP1
(Speed selection 1), SP2 (Speed
selection 2), SP3 (Speed
selection 3), and setting of internal
speed.
The value selected in the
positioning mode (point table
method) with BCD input is
low.
Check SPD1 (Speed selection
1),
SPD2 (Speed selection 2),
SPD3
(Speed selection 3) and SPD4
(Speed selection 4), and then
check if the selected internal
speed is correct.
Review the wiring. Review the
selections of SPD1 (Speed
selection 1), SPD2 (Speed
selection 2), SPD3 (Speed
selection 3), SPD4 (Speed
selection 4), and setting of internal
speed.
An analog signal is not
inputted correctly.
Check the values of analog
speed command and analog
torque command using status
display or setup software (MR
Configurator2
TM
).
Input the analog signals correctly.
The ABS transfer mode is
selected when the absolute
position detection system is
used.
The settings of the electronic
gear are incorrect.
Check the setting value of the
electronic gear.
Set a proper value of the electronic
gear.
The setting of point tables is
incorrect.
Check the point table setting.
Review the point table setting.
Wiring or the command pulse
multiplication setting is
When using an MR-HDP01
manual pulse generator,
Review the wiring and the
command pulse multiplication

 Loading...
Loading...