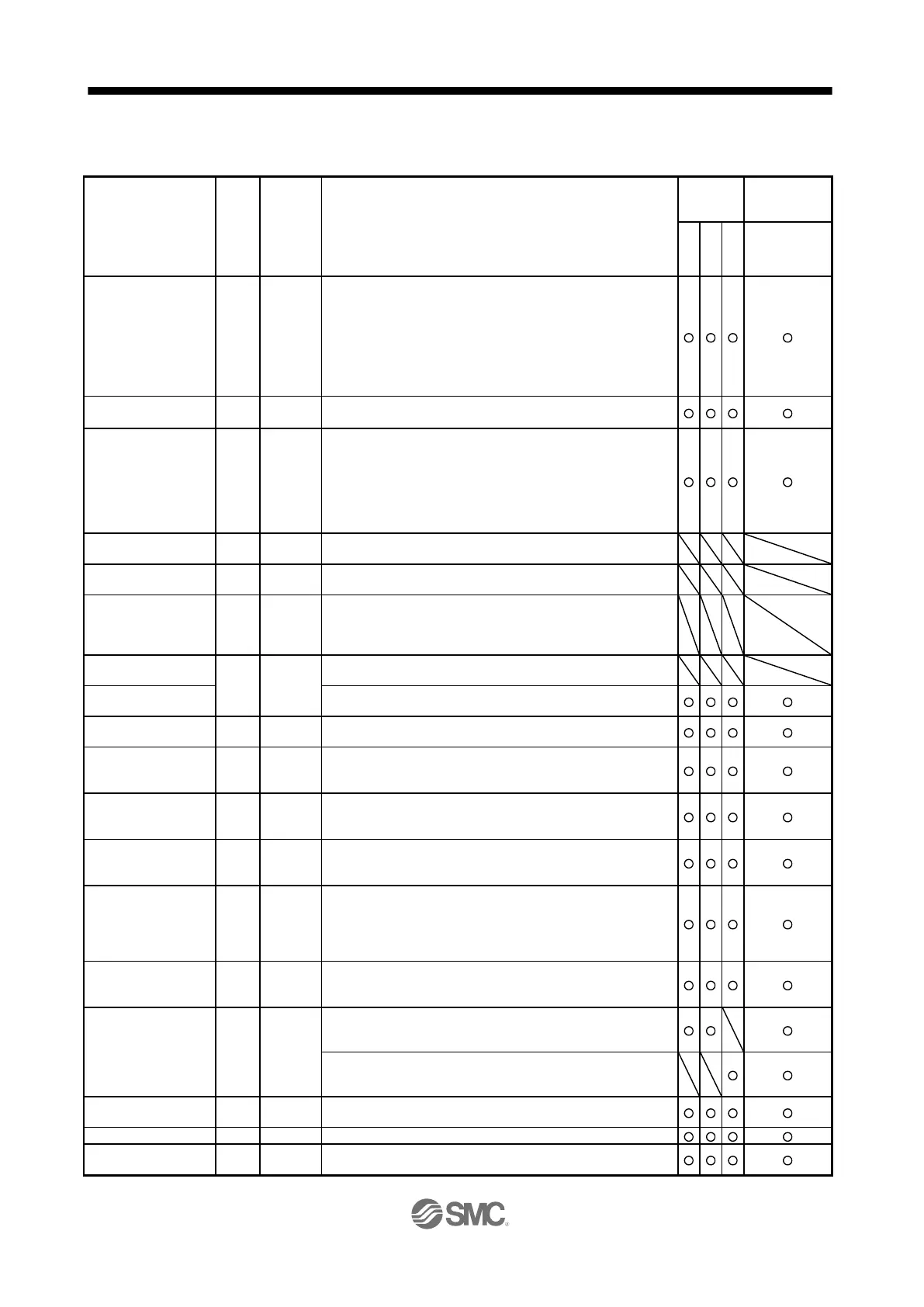
(2) Status display list
The following table lists the servo statuses that may be shown.
Cumulative feedback
pulses
Feedback pulses from the servo motor encoder are counted and
displayed.
The values in excess of ±99999 can be counted. However, the counter
shows only the lower five digits of the actual value since the driver
display is five digits.
Press the "SET" button to reset the display value to zero.
The value of minus is indicated by the lit decimal points in the upper
four digits.
The servo motor speed is displayed.
It is displayed rounding off 0.1 r/min (0.1 mm/s) unit.
The number of droop pulses in the deviation counter are displayed.
The decimal points in the upper four digits are lit for reverse rotation
pulses.
The values in excess of ±99999 can be counted. However, the counter
shows only the lower five digits of the actual value since the driver
display is five digits.
The number of pulses displayed is in the encoder pulse unit.
Cumulative command
pulses
Not used with the positioning mode. "0" is always displayed.
Not used with the positioning mode. "0" is always displayed.
Analog speed command
voltage
Analog speed limit
voltage
Not used with the positioning mode. An applied voltage to the CN1
connector is displayed.
Analog torque command
voltage
Not used with the positioning mode. An applied voltage to the CN1
connector is displayed.
Analog torque limit
voltage
Voltage of TLA (Analog torque limit) voltage is displayed.
The ratio of regenerative power to permissible regenerative power is
displayed in %.
The continuous effective load current is displayed.
The effective value in the past 15 s is displayed relative to the rated
current of 100 %.
The maximum occurrence torque is displayed.
The highest value in the past 15 s is displayed relative to the rated
torque of 100 %.
The instantaneous torque is displayed.
The value of torque being occurred is displayed in real time considering
a rated torque as 100%.
Position within
one-revolution
(1 pulse unit)
Position within one revolution is displayed in encoder pulses.
The values in excess of ±99999 can be counted. However, the counter
shows only the lower five digits of the actual value since the driver
display is five digits.
When the servo motor rotates in the CCW direction, the value is added.
Position within
one-revolution
(1000 pulses unit)
The within one-revolution position is displayed in 1000 pulse increments
of the encoder.
When the servo motor rotates in the CCW direction, the value is added.
The travel distance from the home position is displayed as multi-
revolution counter value of the absolution position encoder in the
absolution position detection system.
The travel distance from the home position is displayed as load side
multi-revolution counter value in the absolution position detection
system.
Load to motor inertia
ratio
The estimated ratio of the load inertia moment to the servo motor shaft
inertia moment is displayed.
The voltage of main circuit converter (between P+ and N-) is displayed.
Encoder inside
temperature
Inside temperature of encoder detected by the encoder is displayed.

 Loading...
Loading...