PB03
PST
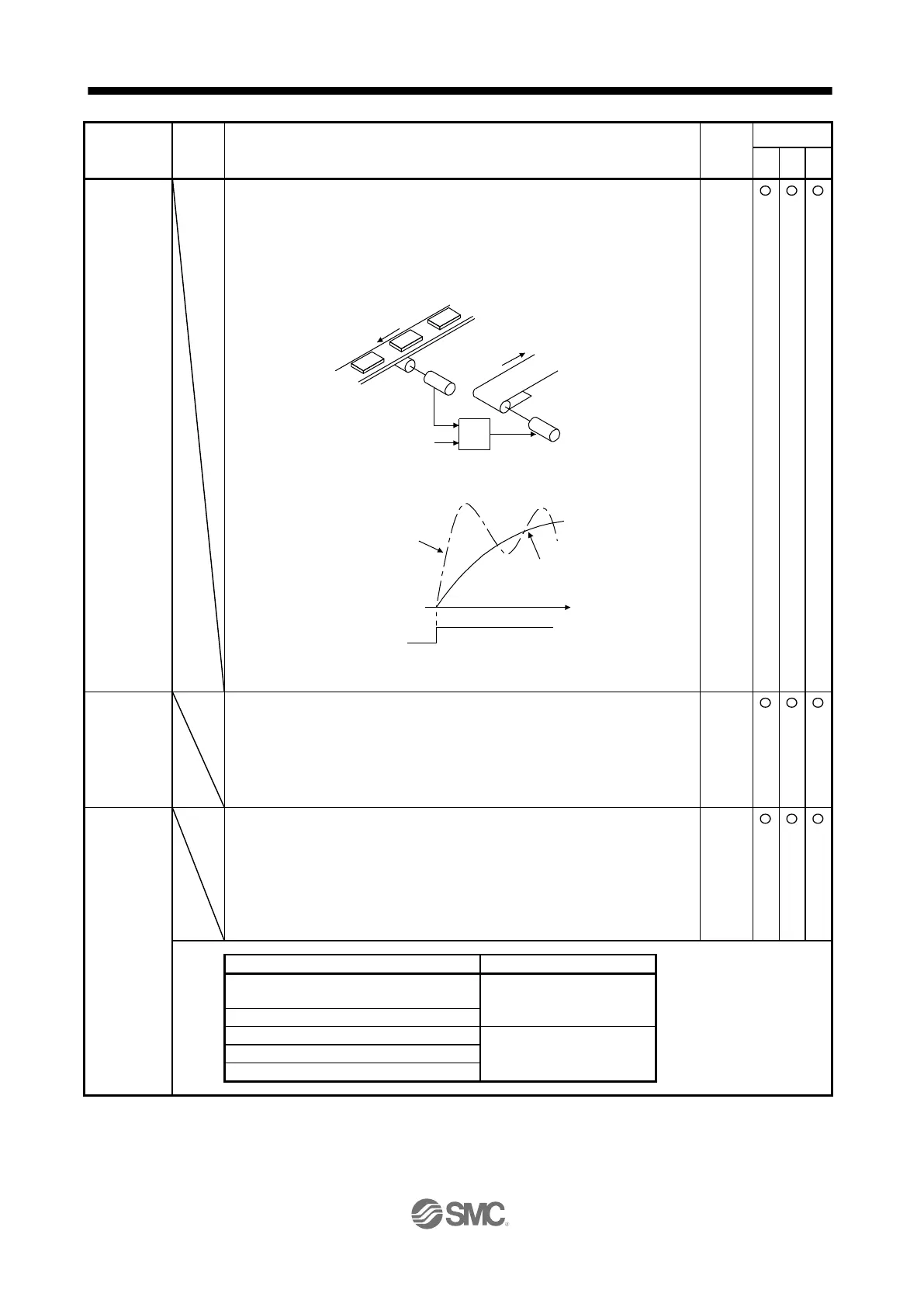
Position
command
acceleration/d
eceleration
time constant
(position
smoothing)
This is used to set the cons
tant of a primary delay to the position command.
You can select a control method from "Primary delay" or "Linear
acceleration/deceleration" in [Pr. PB25 Function selection B-1]. The setting range of
"Linear acceleration/deceleration" is 0 ms to 10 ms. Setting of longer than 10 ms will
be recognized as 10 ms.
(Example) When a command is given from a synchronizing encoder, synchronous
operation will start smoothly even if it starts during line operation.
Setting range: 0 to 65535
PB04
FFC
Feed forward
gain
Set the feed forward gain.
When the setting is 100%, the droop pulses during operation at constant speed are
nearly zero. However, sudden acceleration/deceleration will increase the overshoot.
As a guideline, when the feed forward gain setting is 100%, set 1 s or more as the
acceleration time constant up to the rated speed.
Setting range: 0 to 100
PB06
GD2
Load to motor
inertia
ratio/load to
motor mass
ratio
This is used to set the load to motor inertia ratio.
Setting a value considerably different from the actual load moment of inertia may
cause an unexpected operation such as an overshoot.
The setting of the parameter will be the automatic setting or manual setting
depending on the [Pr. PA08] setting. Refer to the following table for details. When
the parameter is automatic setting, the value will vary between 0.00 and 100.00.
Setting range: 0.00 to 300.00
_ _ _ 0 (2 gain adjustment mode 1
(interpolation mode))
_ _ _ 1 (Auto tuning mode 1)
_ _ _ 2 (Auto tuning mode 2)
_ _ _ 4 (2 gain adjustment mode 2)
Synchronizing
encoder
Start
Servo motor
Servo amplifier
ON
OFF
Without time
constant setting
Without time
constant setting
Servo motor
speed
Start
t

 Loading...
Loading...