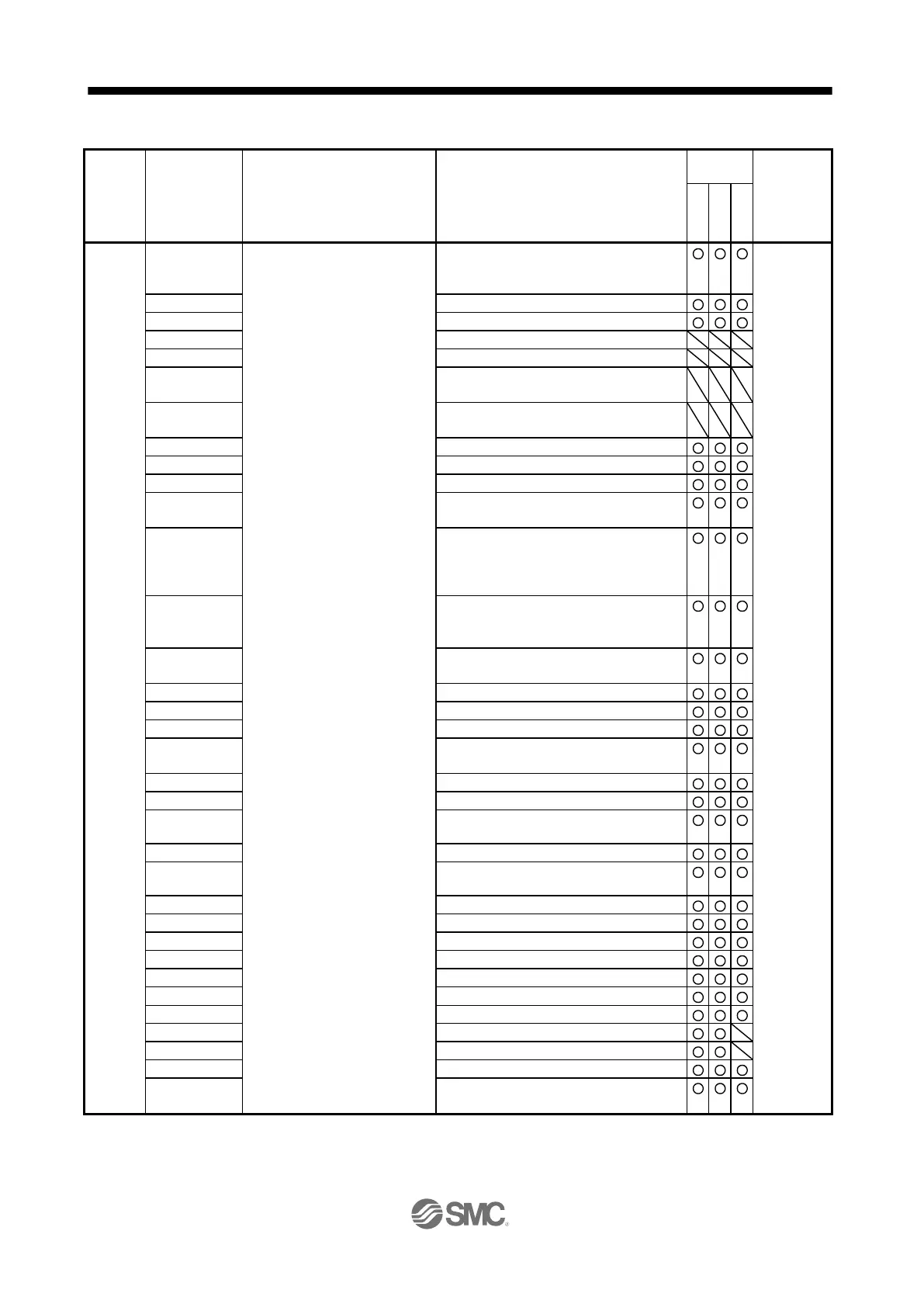
(7) Status display at alarm occurrence (command [3] [5])
Status display symbol and unit
Cumulative feedback pulses
Servo motor-side cumulative feedback
pulses (after gear)
Cumulative command pulses
Analog speed command voltage
Analog speed limit voltage
Analog torque limit voltage
Analog torque command voltage
Instantaneous torque
Instantaneous thrust
Position within one-revolution
Servo motor encoder position within one-
revolution
Virtual position within one-revolution
ABS counter
Servo motor encoder ABS counter
Virtual ABS counter
Load to motor inertia ratio
Load to motor mass ratio
Load-side cumulative feedback pulses
Load-side encoder information 1
Z-phase counter
Load-side encoder information 2
Temperature of servo motor thermistor
Servo motor-side cumulative feedback
pulses (before gear)
Servo motor-side/load-side position
deviation
Servo motor-side/load-side speed deviation
Internal temperature of encoder
Oscillation detection frequency
Number of tough drive operations
Unit total power consumption
Command remaining distance
Point table No./Program No./
Station position No.
 Loading...
Loading...