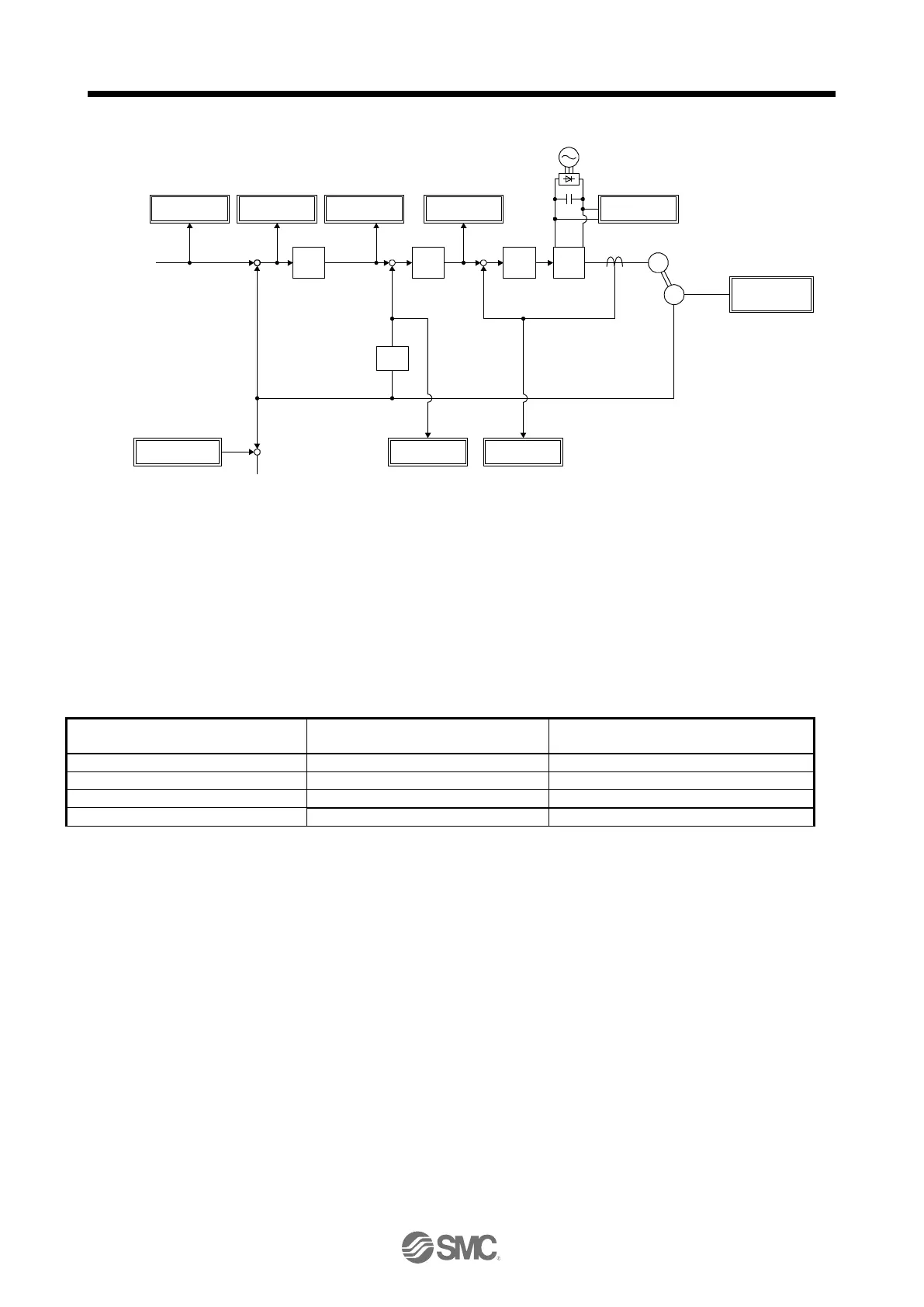
(4) Values of the maximum current command when the analog monitor is at the maximum/minimum
voltage
Values of the maximum current command when the analog monitor is at the maximum/minimum voltage
are listed.
The current command (torque) outputs the maximum current command (maximum torque) at ±8 V. The
maximum current command may not match the rated current/maximum current ratio since it is created
from the torque current in the driver.

 Loading...
Loading...