PC19
*ENRS
Encoder
output pulse
selection
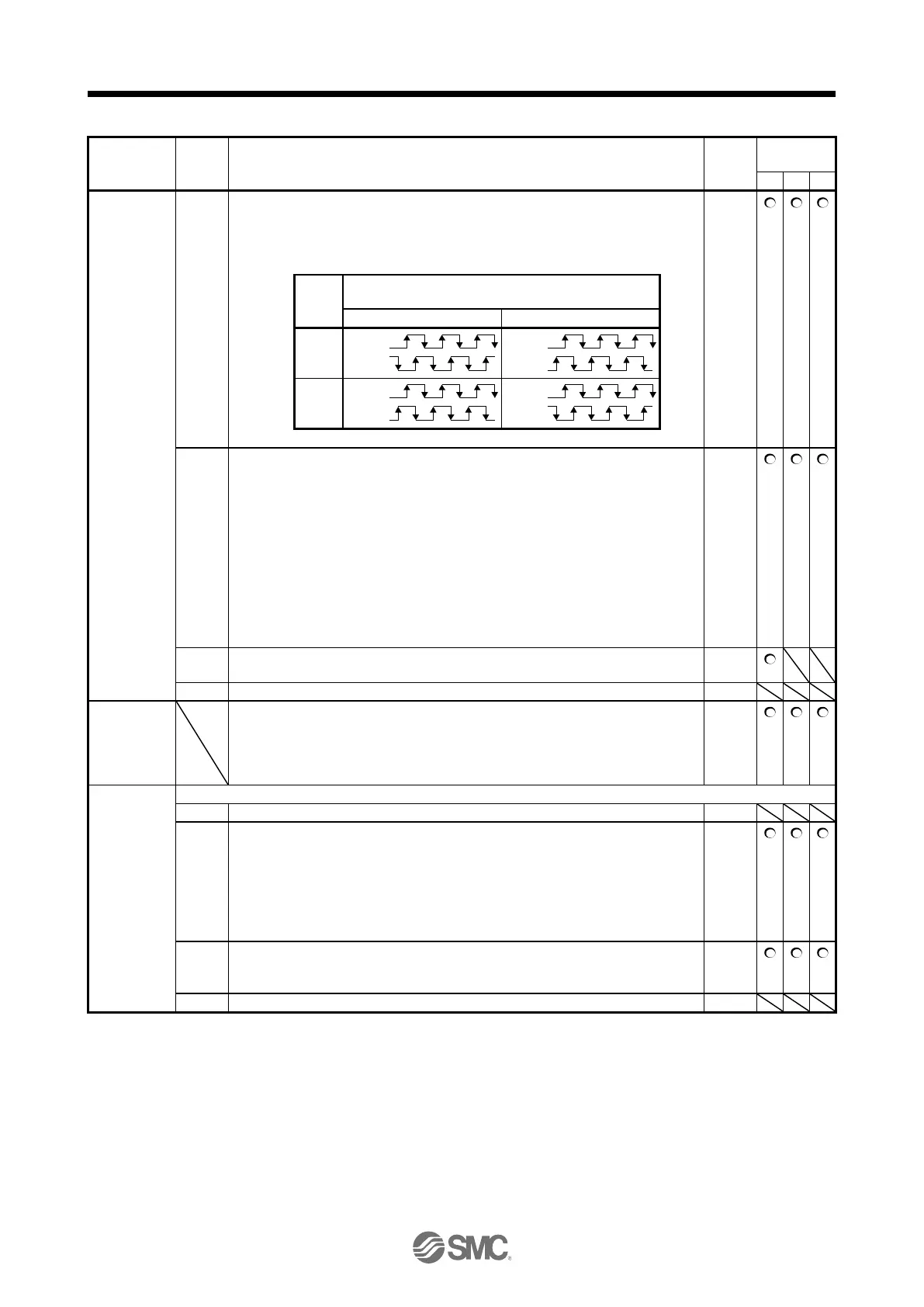
Encoder output pulse phase selection
Select the encoder pulse direction.
0: A-phase 90° shift in CCW
1: A-phase 90° shift in CW
Servo motor rotation direction/
linear servo motor travel direction
CCW or positive direction
Encoder output pulse setting selection
Refer to app. 15 for details.
When you select "1", the setting of [Pr. PA16 Encoder output pulses 2] will be
disabled. When you select "2", the settings of [Pr. PA15 Encoder output pulses] and
[Pr. PA16 Encoder output pulses 2] will be disabled. When you select the setting, do
not change the settings in [Pr. PA06] and [Pr. PA07] after the power-on.
0: Output pulse setting
When "_ 1 0 _" is set to this parameter, [AL. 37 Parameter error] will occur.
1: Dividing ratio setting
2: The same output pulse setting as the command pulse
3: A-phase/B-phase pulse electronic gear setting
4: A/B-phase pulse through output setting
Do not change this value.
PC20
*SNO
Station No.
setting
Set a station No. of the driver for RS-422 and USB communication.
Always set one station to one axis of the driver. Setting one station number to two or
more stations will disable a normal communication.
Setting range: 0 to 31
PC21
*SOP
RS-422
communication
function
selection
Select the details of RS-422 communication function.
RS-422 communication baud rate selection
When using the parameter unit, set "1 _ _ _" in [Pr. PF34].
0: 9600 [bps]
1: 19200 [bps]
2: 38400 [bps]
3: 57600 [bps]
4: 115200 [bps]
RS-422 communication response delay time selection
0: Disabled
1: Enabled (responding after 800 μs or longer delay time)

 Loading...
Loading...