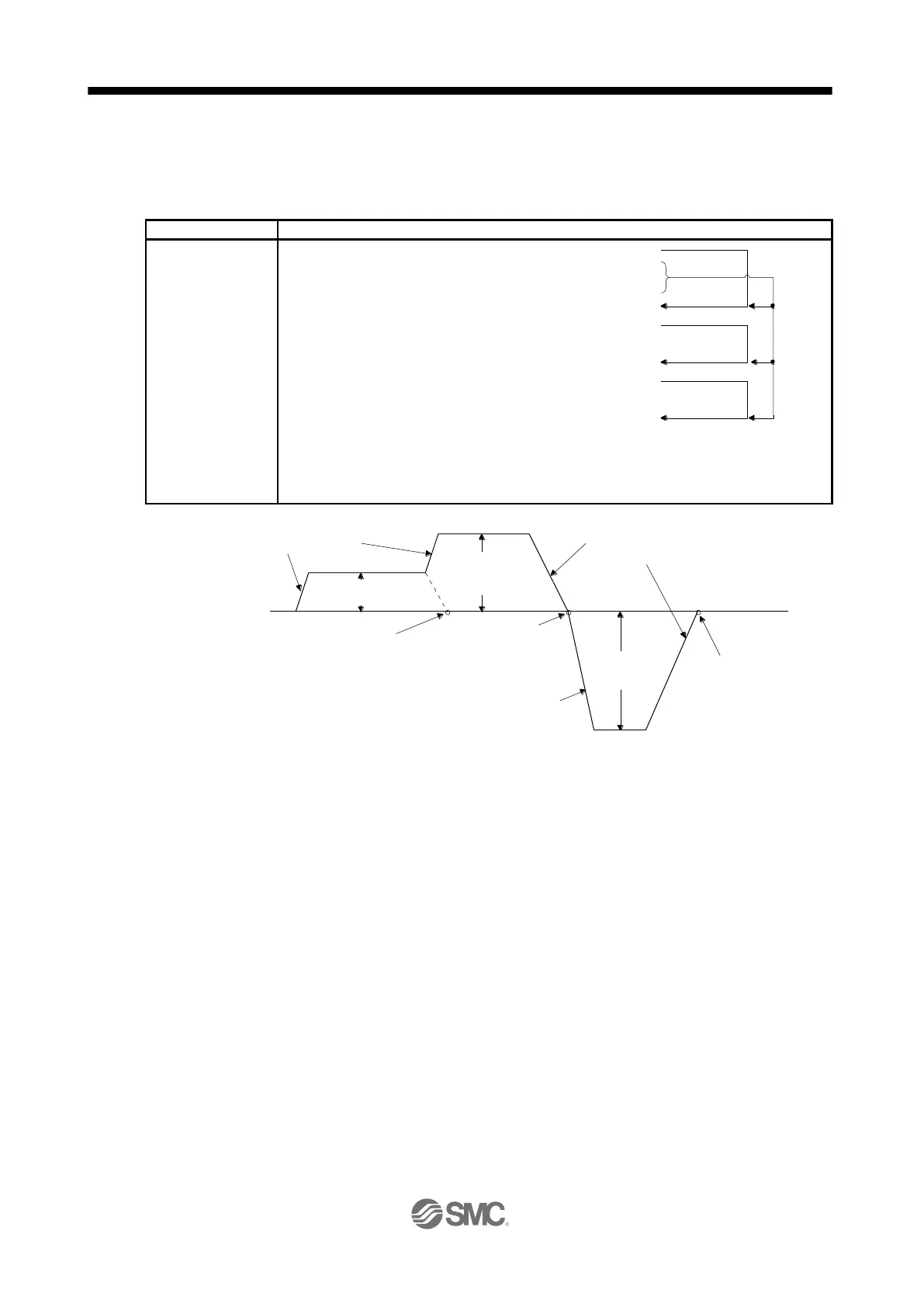
2) Program example 2 (Incorrect usage)
For continuous operations, the acceleration time constant and the deceleration time constant
cannot be changed at each change of the servo motor speed. Therefore, even if you insert an
"STA", "STB", or "STD" command at a speed change, the command is invalid.
Acceleration time constant
Deceleration time constant
Absolute value travel command
Acceleration/deceleration time
constant
Absolute value continuous travel
command
Acceleration/deceleration time
constant
Absolute value continuous travel
command
b) Acceleration time constant
(200 ms)
a) Servo motor speed
(500 r/min)
e) Servo motor
speed
(1000 r/min)
c) Deceleration time constant
(300 ms)
h) Servo motor
speed
(1500 r/min)
j) Absolute value continuous
travel command
(0 × 10
STM
μ
m)
g) Absolute value
continuous travel
command
(1000 × 10
STM
μ
m)
d) Absolute value
travel command
(500 × 10
STM
μ
m)
b) Acceleration time constant
(200 ms)
Forward rotation
0 r/min
Reverse rotation
Servo motor
speed
 Loading...
Loading...