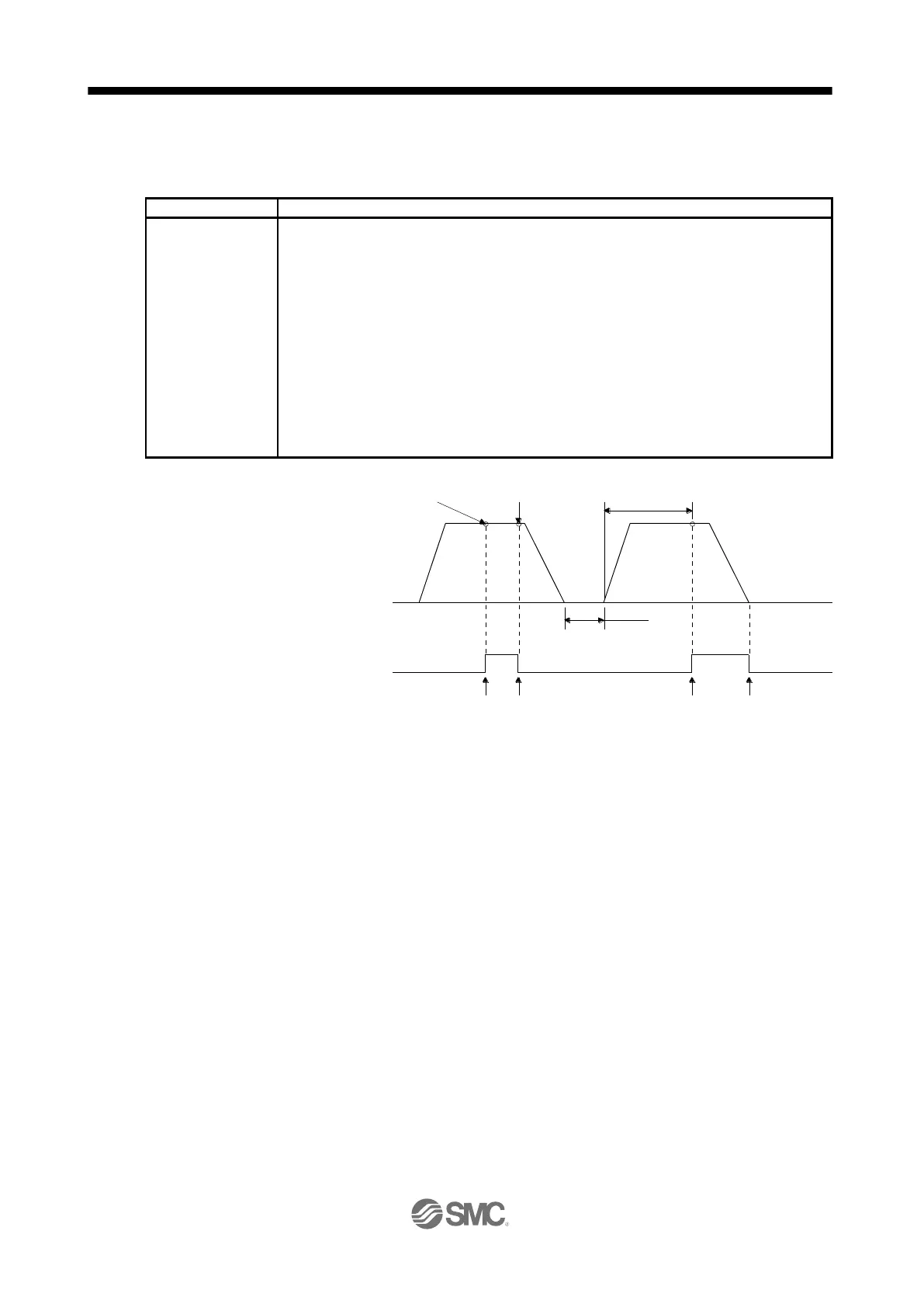
3) Program example 3
When setting the position address where the "OUTON" or "OUTOF" command is executed by
using the "TRIP" or "TRIPI" command
Acceleration time constant
Deceleration time constant
Absolute value travel command
Absolute value trip point specification
Switch on OUT2 (Program output 2).
Absolute value trip point specification
Switch off OUT2 (Program output 2).
Incremental value travel command
Incremental value trip point
specification
Switch on OUT2 (Program output 2).
a) 250 × 10
STM
μ
m
ON
OFF
OUT2
(Program output 2)
100 ms
e) 300 × 10
STM
μ
mc) 400 × 10
STM
μ
m
b)
d) f) g)
Servo motor speed
Forward rotation
0 r/min
Reverse rotation
 Loading...
Loading...