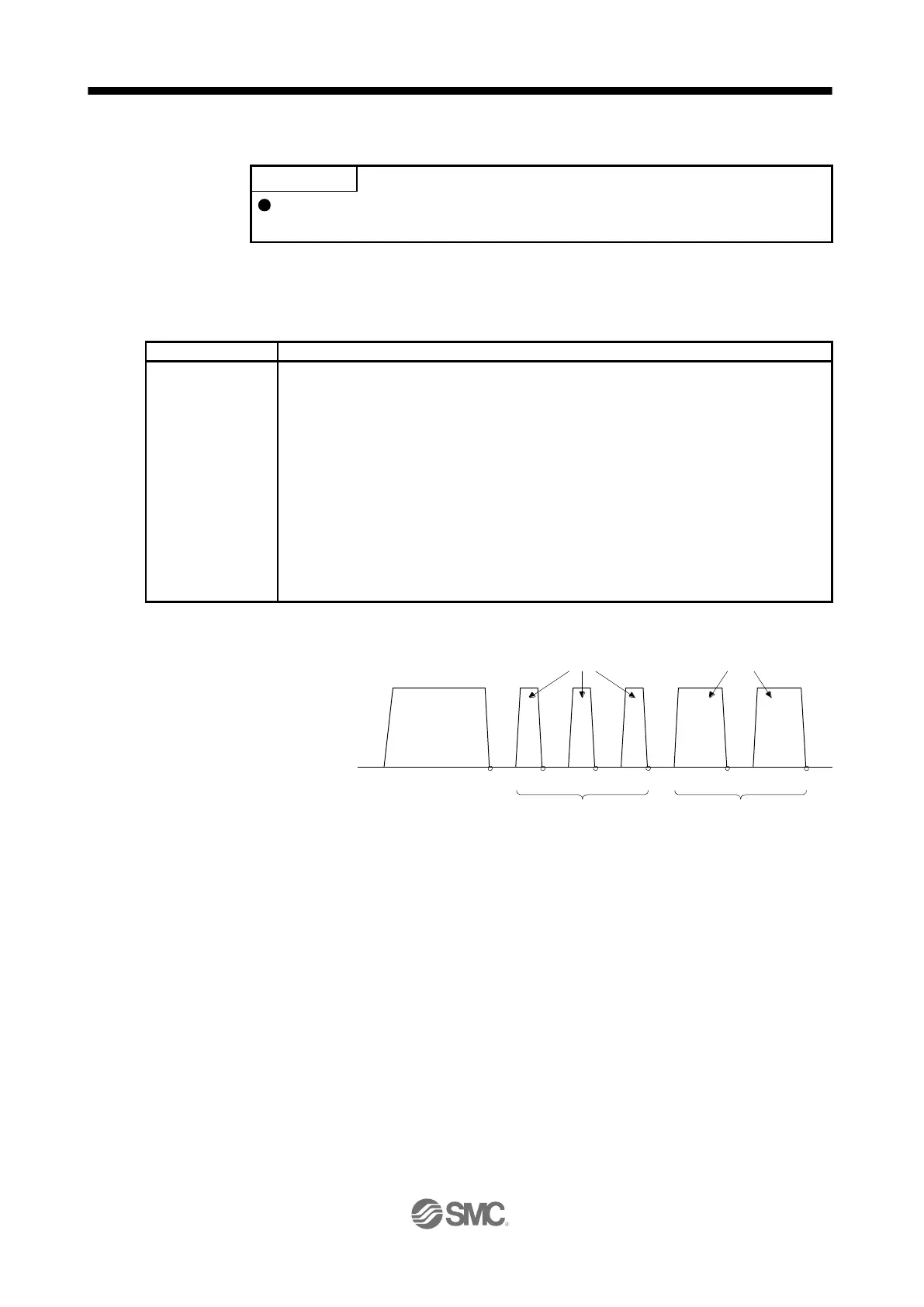
(g) Step repeat instruction (FOR...NEXT)
You cannot insert "FOR...NEXT" commands between a "FOR" command and a
"NEXT" command.
The steps between the "FOR (Setting value)" and the "NEXT" commands are repeated for the set
number of times. Setting "0" repeats the operation endlessly.
For how to stop the program in this status, refer to section 5.2.4 (4).
Acceleration/deceleration time
constant
Absolute value travel command
Start of step repeat instruction
Incremental value travel command
End of step repeat instruction
Start of step repeat instruction
Incremental value travel command
End of step repeat instruction
b) Incremental value
travel command
(100 × 10
STM
μm)
d) Incremental value
travel command
(200 × 10
STM
μm)
a) c)
e) f)
1000 1100 1200 1300 1500 1700
Servo motor speed
Forward rotation
0 r/min
Reverse rotation
 Loading...
Loading...