(i) Current position latch (LPOS)
When the current position is stored using LPS (Current position latch input), the
value varies depending on the servo motor speed at switch-on of LPS.
The program does not proceeds to the next step until LPS (Current position latch
input) is switched on.
The stored data is not cleared without power-off of the driver.
After the input of LPS (Current position latch input) becomes valid by the "LPOS"
command, the input is cleared in the following conditions.
When the rising edge of LPS (Current position latch input) is detected
When the program ends
When the operation mode is changed
When the servo motor forcibly stops
When an alarm occurs
When the servo motor enters the servo-off status
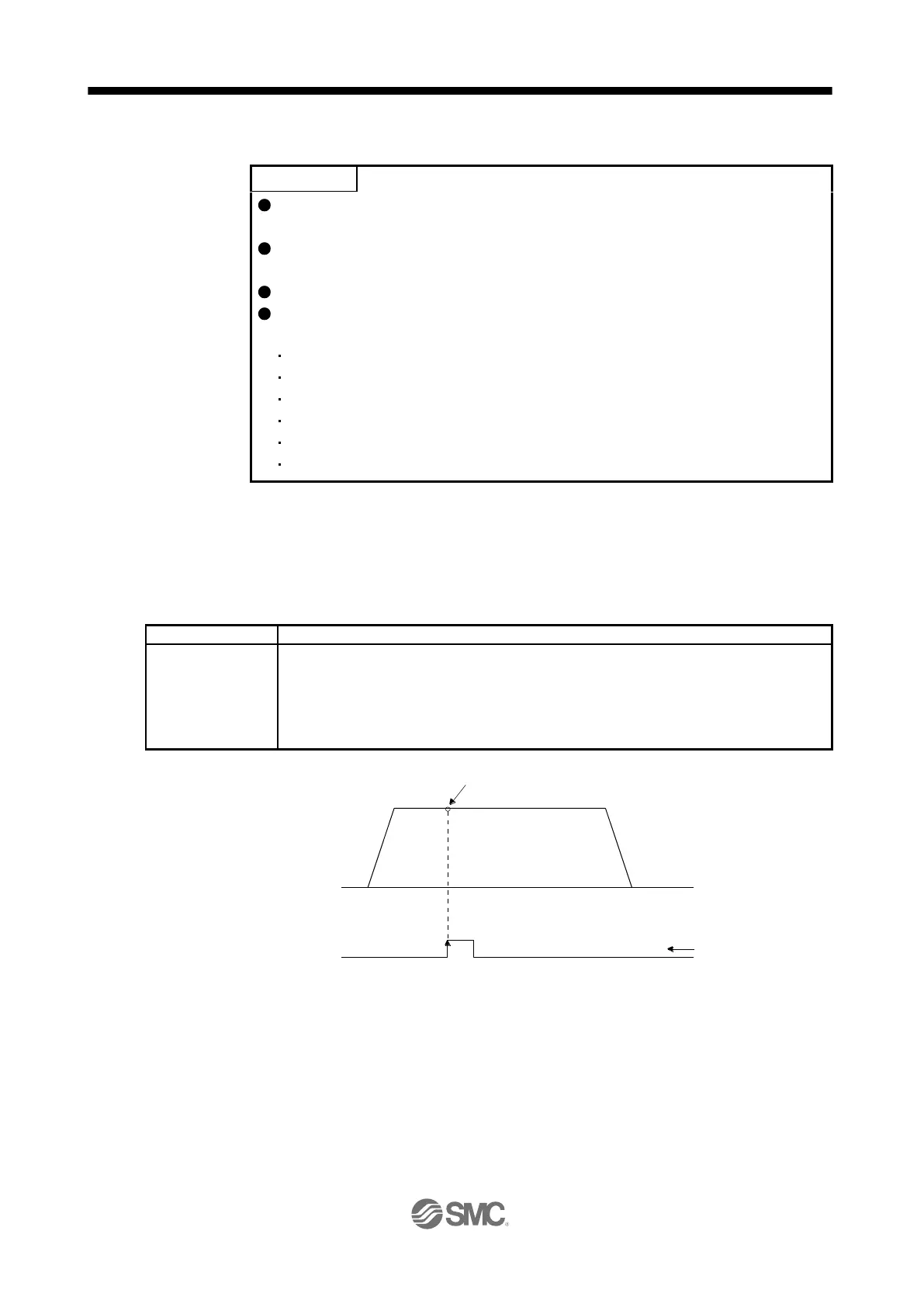
The current position at switch-on of LPS (Current position latch input) is stored. The stored position
data can be read with the communication function.
The current position latch function, which is set during the execution of the program, is reset when
the program ends. The function is also reset at an operation mode change, forced stop, alarm
occurrence, or servo-off. The function is not reset at a temporary stop only.
Acceleration time constant
Deceleration time constant
Absolute value travel command
Set a current position latch.
LPS turns on at on edge
by LPOS. (a))
1000
ON
OFF
Current position
LPS (Latch input)
Current position300 [×10
STM
μm]
is memorized.
Servo motor speed
Forward rotation
0 r/min
Reverse rotation
 Loading...
Loading...