PC51
RSBR
Forced stop
deceleration
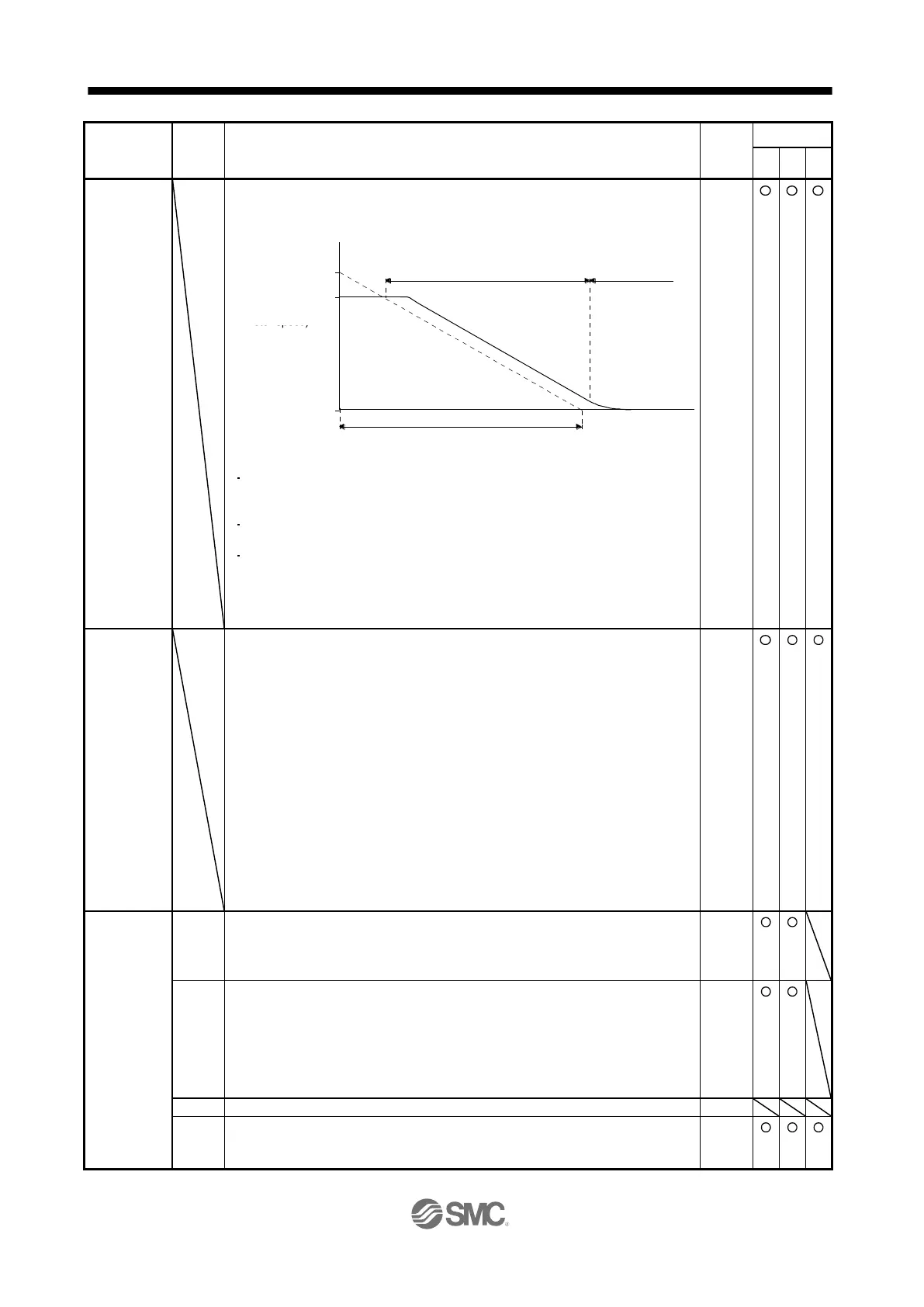
time constant
Set a deceleration time constant when you use the forced stop deceleration function.
Set the time per ms from the rated speed to 0 r/min.
Setting "0" will be 100 ms.
[Precautions]
If the servo motor torque is saturated at the maximum value during forced stop
deceleration because the set time is too short, the time to stop will be longer than
the set time constant.
[AL. 50 Overload alarm 1] or [AL. 51 Overload alarm 2] may occur during forced
stop deceleration, depending on the set value.
After an alarm that leads to a forced stop deceleration, if an alarm that does not
lead to a forced stop deceleration occurs or if the control circuit power supply is
cut, dynamic braking will start regardless of the deceleration time constant setting.
Setting range: 0 to 20000
PC54
RSUP1
Vertical axis
freefall
prevention
compensation
amount
Set the compensation amount of the vertical axis freefall prevention function.
Set it per servo motor rotation amount.
When setting a positive value, the servo motor will pull in the direction of the servo
motor rotation direction at positioning address increasing with the servo motor
rotation amount.
For example, if a positive compensation amount is set when the [Pr. PA14 Rotation
direction selection] setting is "1", the axis will be pulled to the CW direction.
The vertical axis freefall prevention function is performed when all of the following
conditions are met.
1) The value of the parameter is other than "0".
2) The forced stop deceleration function is enabled.
3) Alarm occurs or EM2 turns off when the servo motor speed is zero speed or less.
4) MBR (Electromagnetic brake interlock) was enabled in [Pr. PD23] to [Pr. PD26],
[Pr. PD28], and [Pr. PD47], and the base circuit shut-off delay time was set in [Pr.
PC16].
Setting range: -25000 to 25000
PC60
*COPD
Function
selection C-D
Motor-less operation selection
Set the motor-less operation.
0: Disabled
1: Enabled
High-resolution analog input selection
Select the resolution of VC (Analog override).
When you change parameters, perform offset adjustment with [Pr. PC37 Analog
override offset]. The offset adjustment can be performed by executing VC automatic
offset.
0: Disabled
1: Enabled
[AL. 9B Error excessive warning] selection
0: [AL. 9B Error excessive warning] is disabled.
1: [AL. 9B Error excessive warning] is enabled.
Forced stop deceleration
[Pr. PC51]
0 r/min
Servo motor speed
Rated speed
Dynamic brake
deceleration
(Linear servo
motor speed)
(0 mm/s)
 Loading...
Loading...