APPENDIX
App. - 30
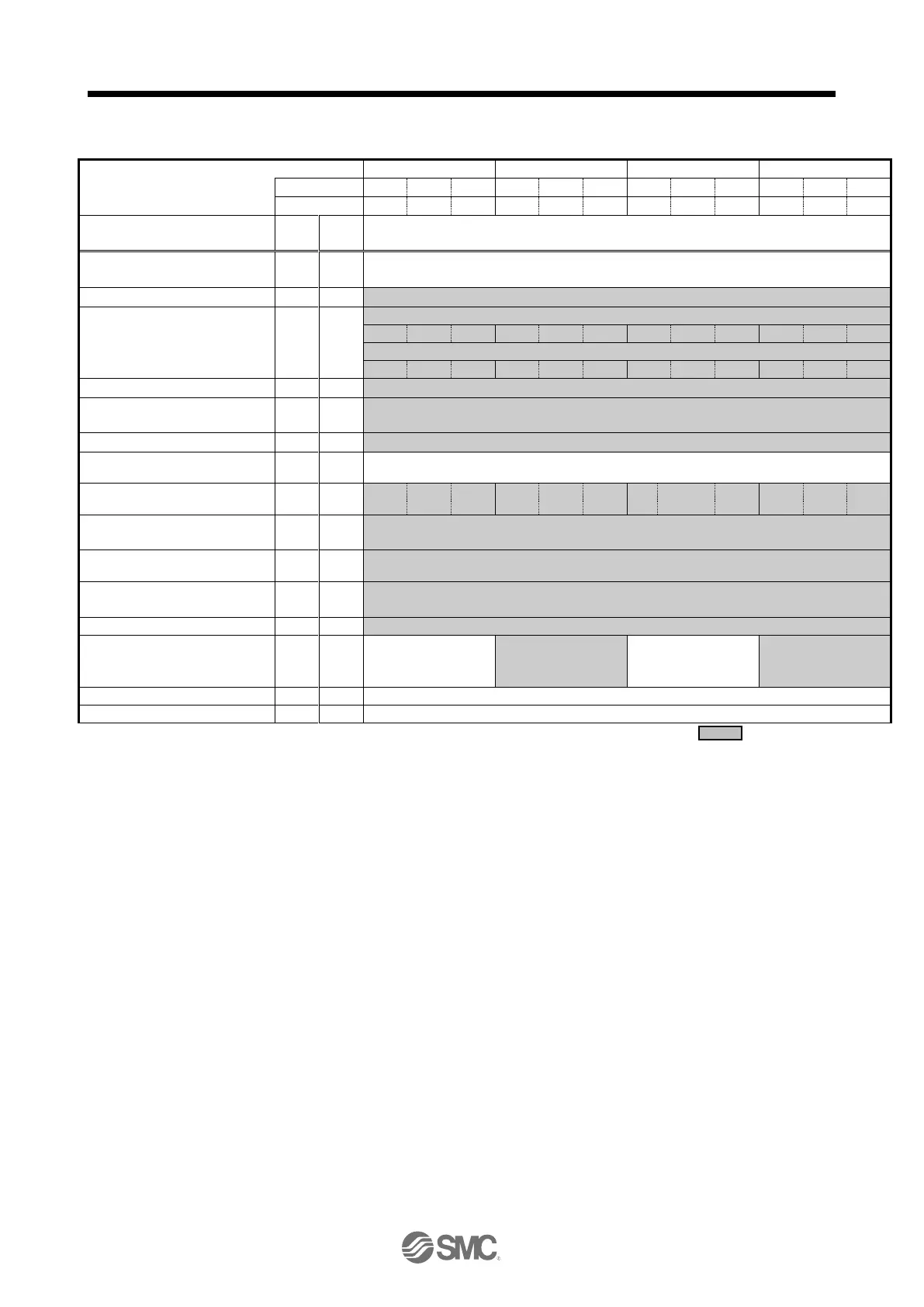
Recommended Parameter Values [LEY]
Number of command input
pulses per revolution
*3.
Electronic gear numerator *3.
Electronic gear denominator *3.
2001 (J3 electronic gear setting value compatibility mode)
Feel length multiplication (STM)
(Multiplier)
0000 (<1000 stroke)/0001 (>1000 stroke)
Home position return type
Home position return
direction
Home position return
Speed (rpm)
Home position return position
data (μm)
-2000 (<1000 stroke)/-200 (>1000 stroke)
Stopper type home position return
stopper time (msec)
Stopper type home position return
torque limit value (%)
0000 (Non)/0002 (LEC-MR-RB-032)
Rotation direction selection *4
0
(
+:Counter motors
side
)
1
(+:Counter motors
side )
0
(
+:Counter motors
side
)
1
(+:Counter motors
side )
Load to motor inertia moment ratio
*1. Parameter is set to the recommended value. Please set parameter according to customer application.
*2. Mechanical resonance may occur depending on the shape or mounting orientation of the work piece.
Please change this parameter during initial configuration.
(Parameter initial configuration ⇒ Set the recommended parameter value ⇒ Operation start)
*3. Other than positioning mode: Actuator travel distance at 10 [μm/pulse] per pulse.
Positioning Mode: Minimum actuator travel distance of 1[μm].
*4. When the motor mounting position is right side parallel (LEY*R) or left side parallel (LEY*L), the rotation
direction selection is 0(+: Counter motors side).

 Loading...
Loading...