Parker EME
Setting up Compax3
192-121102 N04 June 2008 109
4.3.3.7 Position controller main axis (status controller)
In this chapter you can read about:
Object 2200.24: Filter - Following Error ........................................................................... 109
Object 2200.11: Filter - Following Error ........................................................................... 109
Object 2200.38: P-term.................................................................................................... 110
Object 2200.37: I-term ..................................................................................................... 110
Object 2200.30: Internal window I-term ........................................................................... 110
Object 2200.31: External window I-term.......................................................................... 110
Object 2200.32: Positive limit I-term ................................................................................ 111
Object 2200.33: Negative limit I-term .............................................................................. 111
Object 2100.13: Speed feedback .................................................................................... 111
Object 2100.14: Acceleration feedback ........................................................................... 112
Object 2210.8: Filter control signal .................................................................................. 112
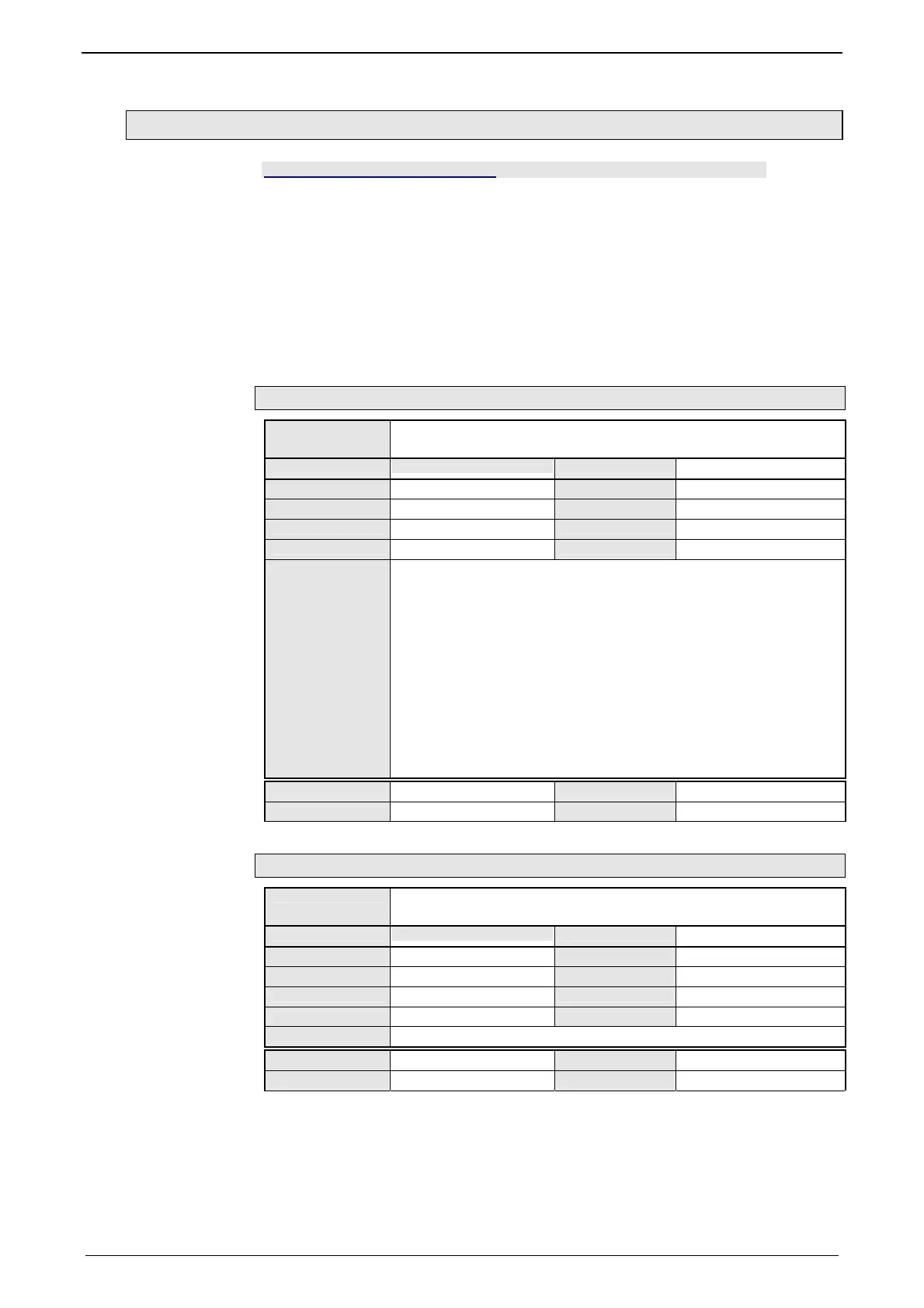
Object 2200.24: Filter - Following Error
Object name
C3Plus.PositionController_TrackingErrorFilter_us
Object No. 2200.24 HEDA-channel
no
Access:
Read/write
Valid after:
VP
CodeSys object:
no
CodeSys format:
INT
Unit
us
Minimum value
0 us
Maximum value
8300000 us
Remark:
Time constant of the following error filter of the position controller in µs
(analog to 2200.11 in %)
Is set to the default value corresponding to the motor in the
configuration when changing the motor.
Default value 0us.
The filter is deactivated for values from 0 to 62us.
C3F:
The filter is deactivated for values from 0 to 125us.
Only internal: Due to structure, the following error is, as from R07,
filtered with the sum time constant actual velocity value filter 1 + actual
velocity value 2 + time constant of following filter + user filter 2200.24.
CAN No.
-
PD object:
no
Profibus-No. (PNU)
-
Bus format:
U16
Object 2200.11: Filter - Following Error
Object name
C3Plus.PositionController_TrackingErrorFilter
Object No. 2200.11 HEDA-channel
no
Access:
Read/write
Valid after:
VP
CodeSys object:
yes
CodeSys format:
INT
Unit
%
Minimum value
0 %
Maximum value
554 %
Remark:
Is set to the corresponding default value when changing the motor.
CAN No.
-
PD object:
no
Profibus-No. (PNU)
-
Bus format:
U16

 Loading...
Loading...







