Motion control C3F_T40
190 192-121102 N04 June 2008
5.6.6. Manual operation (C3_Jog)
FB name C3_Jog
Traveling along the axis in manual mode (in the "standstill" state)
VAR_IN_OUT
Axis
INT Axis-ID (library constants)
VAR_INPUT
JogForward
BOOL
JogForward = TRUE makes the axis move in positive
direction.
JogBackward
BOOL
JogBackward = TRUE makes the axis move in negative
direction. <Value range> (see page Fehler! Textmarke
nicht definiert.)
Velocity
REAL Speed value [Units/s] <value range> (see page Fehler!
Textmarke nicht definiert.)
Acceleration
DINT Value of the acceleration [Units/s²] <value range> (see
page Fehler! Textmarke nicht definiert.)
Deceleration
DINT Value of deceleration during stop[Units/s²] <value range>
(see page Fehler! Textmarke nicht definiert.)
Jerk
DINT Value of the acceleration and deceleration jerk (see page
183) [Units/s³] <
value range> (see page Fehler!
Textmarke nicht definiert.)
VAR_OUTPUT
Busy
BOOL Module is active (manual operation in progress)
Error
BOOL
Error during manual operation or faulty parameter when
starting manual operation
Note:
The axis must be in the "standstill" state in order to start manual operation
(Jogging Mode).
Start: When starting manual operation, the output ”Busy” is set to TRUE.
Stop: The axis is brought to a standstill if the respective input (JogForward or
JogBackward) is set to FALSE again
As soon as manual operation is stopped, the output ”Busy” is set to FALSE.
Further commands can only be executed after this feedback.
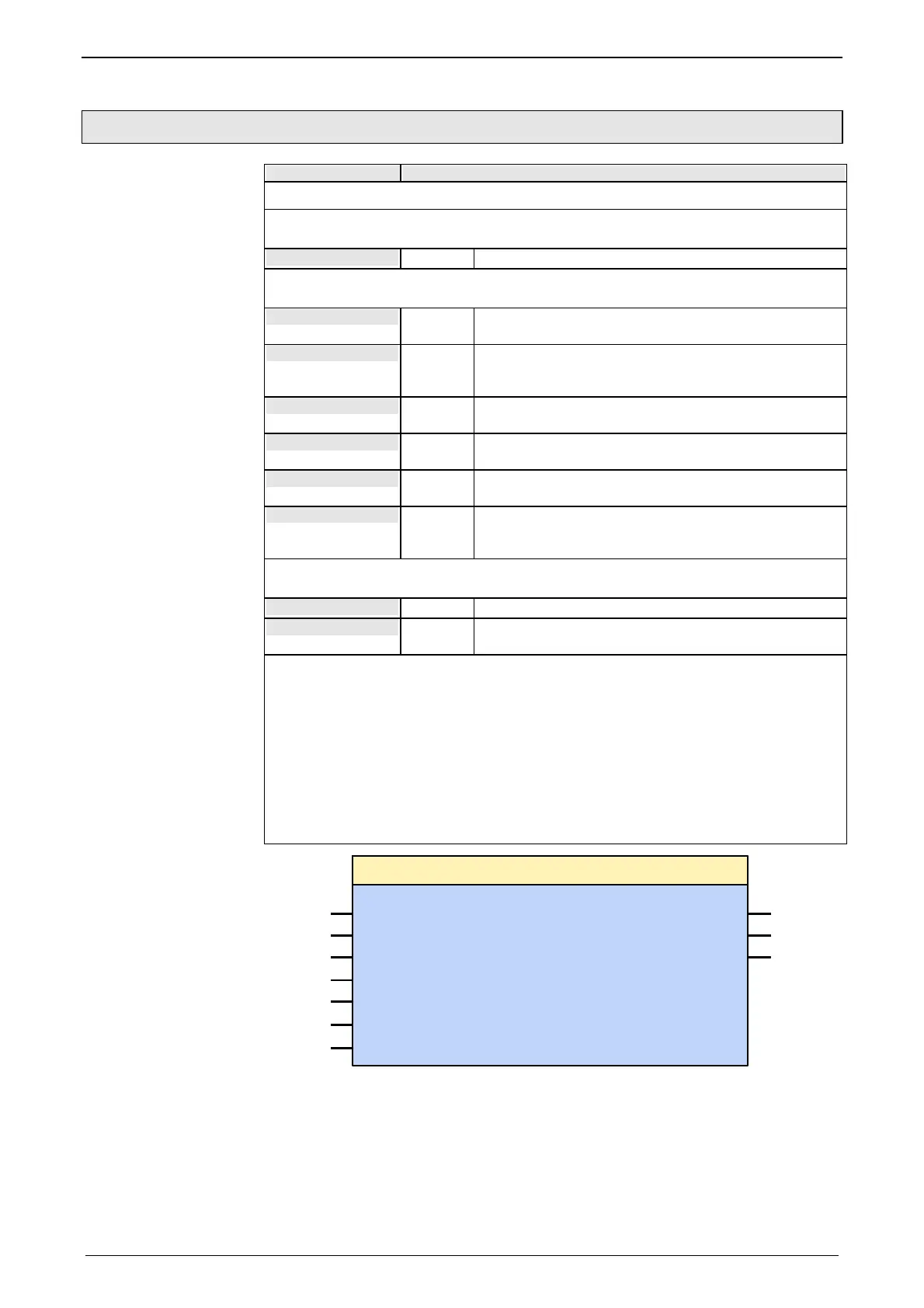
C3_Jog
Axis : INT (VAR_IN_OUT)
Axis : INT (VAR_IN_OUT)
Busy : BOOL
JogForward : BOOL
JogBackward : BOOL
Velocity : REAL
Acceleration : DINT
Deceleration : DINT
Error : BOOL
Jerk : DINT
 Loading...
Loading...










