Motion control C3F_T40
188 192-121102 N04 June 2008
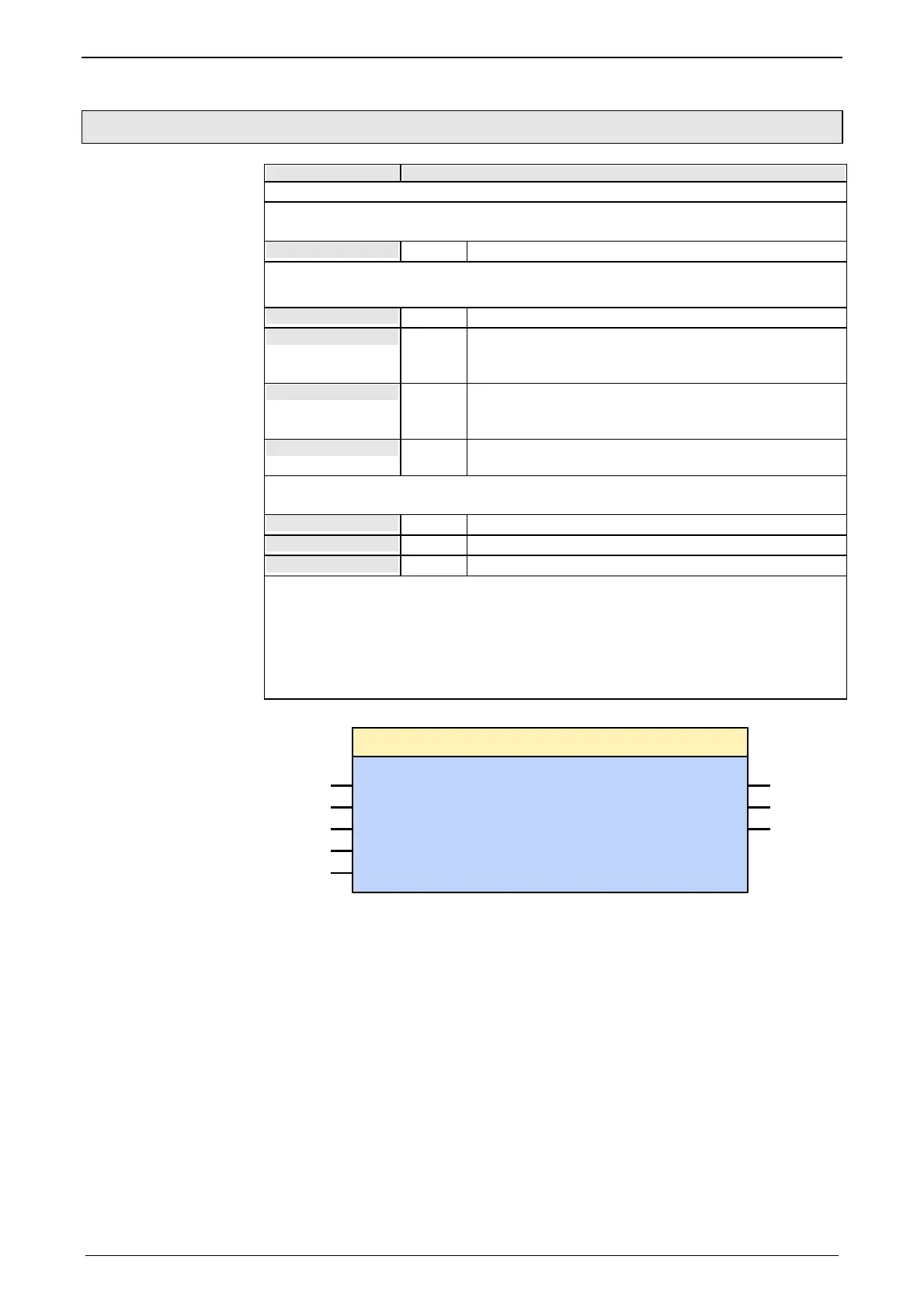
5.6.5. Continuous positioning (MC_MoveVelocity)
FB name MC_MoveVelocity
Continuous controlled positioning with adjustable speed
VAR_IN_OUT
Axis
INT Axis-ID (library constants)
VAR_INPUT
Execute
BOOL Starts the sequences of the module with positive edge
MoveVelocity
REAL
Value of maximum speed (always positive) (not necessarily
reached) [Units/s]
Value range: 0 rev/s ... 2000 rev/s
Acceleration
DINT
Value of the acceleration and deceleration (always positive)
[Units/s²]
Value range: 0.24 rev/s² ... 1000000 rev/s²
Direction
INT
Selection: positive direction, negative direction, current
direction; library constants (see page 161)
VAR_OUTPUT
InVelocity
BOOL Specified target speed on the setpoint output is reached
CommandAborted
BOOL Execution interrupted
Error
BOOL Error during positioning
Note:
To be able to stop the drive, the function module must be interrupted by another
positioning function module or positioning must be stopped by calling the
MC_Stop function module.
A positioning to the end limit follows.
Execute : BOOL InVelocity : BOOL
Error : BOOL
MC_MoveVelocity
CommandAborted : BOOLVelocity : REAL
Acceleration : DINT
Direction : INT
Axis : (VAR_IN_OUT)

 Loading...
Loading...







